
 .
. =
= .
. =
= ,OP3=
,OP3= .
. ,0).
,0). ,0).
,0). =
= =2
=2 .
. .
. .
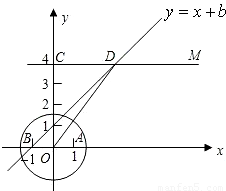
. ,0)时,P3D=OP3=
,0)时,P3D=OP3= ,
, .
.
 浙江之星课时优化作业系列答案
浙江之星课时优化作业系列答案 激活思维优加课堂系列答案
激活思维优加课堂系列答案科目:初中数学 来源: 题型:
 在直角坐标平面内,已点A(3,0)、B(-5,3),将点A向左平移6个单位到达C点,将点B向下平移6个单位到达D点.
在直角坐标平面内,已点A(3,0)、B(-5,3),将点A向左平移6个单位到达C点,将点B向下平移6个单位到达D点.查看答案和解析>>
科目:初中数学 来源: 题型:
A、(-1,
| ||
B、(-1,-
| ||
C、(-
| ||
D、(-
|
查看答案和解析>>
科目:初中数学 来源: 题型:
查看答案和解析>>
科目:初中数学 来源: 题型:
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com