科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
 )
) )
) ,-1)
,-1) ,-1)
,-1)查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
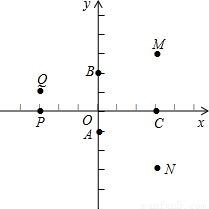 如图,点A,B,C的坐标分别为(0,-1),(0,2),(3,0).从下面四个点M(3,3),N(3,-3),P(-3,0),Q(-3,1)中选择一个点,以A,B,C与该点为顶点的四边形不是中心对称图形,则该点是( )
如图,点A,B,C的坐标分别为(0,-1),(0,2),(3,0).从下面四个点M(3,3),N(3,-3),P(-3,0),Q(-3,1)中选择一个点,以A,B,C与该点为顶点的四边形不是中心对称图形,则该点是( )查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
 ,
, )
) ,
, )
) ,
, )
) ,
, )
)查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
查看答案和解析>>
科目: 来源:第25章《图形的变换》常考题集(08):25.2 旋转变换(解析版) 题型:选择题
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com