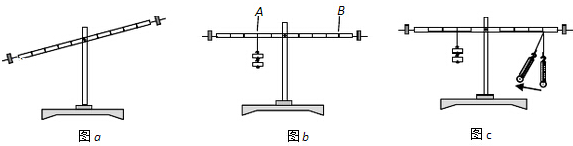

分析 (1)调节杠杆平衡时,平衡螺母向上翘的一端移动.
(2)设杠杆的一个小格为L,一个钩码重为G,根据杠杆平衡求出钩码的个数.
(3)阻力和阻力臂不变时,动力臂减小,动力变大;
(4)结合图片和生活经验,判断杠杆在使用过程中,动力臂和阻力臂的大小关系,再判断它是属于哪种类型的杠杆,省力的费距离、费力的省距离.
解答 解:(1)由图a知,杠杆的右端较高,为使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向右旋.
(2)设杠杆的一个小格为L,一个钩码重为G,
因为,F1l1=F2l2,
所以,2G×2L=nG×4L,
所以,n=1,所以在A处挂1个钩码.
(3)弹簧测力计由竖直方向逐渐向左转动时,阻力和阻力臂不变,动力臂变小,根据杠杆的平衡条件可知,动力变大,所以,弹簧测力计的示数将变大.
(4)A、钳子在使用过程中,动力臂大于阻力臂,是省力杠杆,但费距离;
B、独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆,但费距离;
C、羊角锤在使用过程中,动力臂大于阻力臂,是省力杠杆,但费距离;
D、筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,但省距离.
故答案为:(1)右;(2)1;(3)变大;(4)D.
点评 在探究杠杆平衡条件时,使杠杆在水平位置平衡,是为了便于在杠杆上读出动力臂和阻力臂.杠杆平衡条件是杠杆平衡计算的基础内容,一定要掌握.
此题同时考查杠杆的分类,主要包括以下几种:①省力杠杆,动力臂大于阻力臂;②费力杠杆,动力臂小于阻力臂;③等臂杠杆,动力臂等于阻力臂.

 金钥匙试卷系列答案
金钥匙试卷系列答案科目:初中物理 来源: 题型:解答题
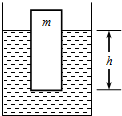 如图所示,一个底面积为1×10-2m2的柱形容器内的水面上漂浮着一个圆柱形木块,木块的质量为m=600g,密度为0.6×103kg/m3,底面积为5×10-3m2.求:
如图所示,一个底面积为1×10-2m2的柱形容器内的水面上漂浮着一个圆柱形木块,木块的质量为m=600g,密度为0.6×103kg/m3,底面积为5×10-3m2.求:查看答案和解析>>
科目:初中物理 来源: 题型:填空题
 (1)如图所示的日晷是通过观察直杆在阳光下影子的方位和长短来确定时间,其中影子的形成可以用光的直线传播来解释.
(1)如图所示的日晷是通过观察直杆在阳光下影子的方位和长短来确定时间,其中影子的形成可以用光的直线传播来解释.查看答案和解析>>
科目:初中物理 来源: 题型:选择题
| A. | 缩小的实像 | B. | 放大的实像 | C. | 缩小的虚像 | D. | 放大的虚像 |
查看答案和解析>>
科目:初中物理 来源: 题型:填空题
 书包带做的比较宽,是为了减小压强.如图所示,将纸条的一端按在嘴唇的下方,向前吹气时,会看到纸条向上(选填“上”或“下”)飘动,这是因为气体流速越大,气体压强越小.
书包带做的比较宽,是为了减小压强.如图所示,将纸条的一端按在嘴唇的下方,向前吹气时,会看到纸条向上(选填“上”或“下”)飘动,这是因为气体流速越大,气体压强越小.查看答案和解析>>
科目:初中物理 来源: 题型:填空题
 把食物放在冰箱里,一会儿变凉了,这是用热传递的方法改变了物体的内能.如图所示是物理课上老师做的演示实验.在试管中装些水,用软木塞塞住,加热使水沸腾,水蒸气会把软木塞冲开,在此过程中内能转化为机械能.
把食物放在冰箱里,一会儿变凉了,这是用热传递的方法改变了物体的内能.如图所示是物理课上老师做的演示实验.在试管中装些水,用软木塞塞住,加热使水沸腾,水蒸气会把软木塞冲开,在此过程中内能转化为机械能.查看答案和解析>>
科目:初中物理 来源: 题型:解答题
查看答案和解析>>
科目:初中物理 来源: 题型:选择题
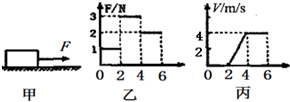
| A. | 0~2s内物体保持静止,不受摩擦力的作用 | |
| B. | 2~4s内物体做匀速直线运动 | |
| C. | 2~4s内物体受到的摩擦力为3N | |
| D. | 2~6s内物体受到的摩擦力大小保持不变 |
查看答案和解析>>
科目:初中物理 来源: 题型:解答题
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com