| 实验次数 | 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 1 | 2 | 5 | 1 | 10 |
| 2 | 4 | 10 | 8 | 5 |
| 3 | 3 | 6 | 2 | 9 |
| 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 3 | 4 | 4 | 3 |
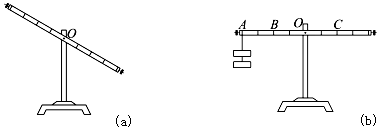
分析 (1)①杠杆静止时或杠杆匀速转动时,杠杆处于平衡状态.
②调节杠杆在水平位置平衡时,平衡螺母向上翘的一端移动.
③探究杠杆平衡条件时,使杠杆在水平位置平衡,便于测量力臂大小,杠杆的重心通过支点,消除杠杆重对杠杆平衡的影响,使实验简单化,便于探究.
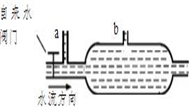
(2)根据阻力是阻碍杠杆转动的力,动力是使杠杆转动的力,确定B点和C点施加力的方向.根据杠杆平衡条件求出B、C点挂钩码数量.
(3)杠杆平衡条件:动力×动力臂=阻力×阻力臂(F1L1=F2L2).
(4)实验时,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律.
解答 解:(1)杠杆处于静止状态,杠杆处于平衡状态;杠杆的左端上翘,平衡螺母向上翘的左端移动,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小,杠杆重心通过支点,可以消除杠杆重对杠杆平衡的影响.
(2)操作时,把钩码分别挂在杠杆的两侧,改变钩码的个数或在杠杆上的力臂的大小,使杠杆平衡.
设杠杆的一个小格是l,设右端挂钩码重为F,根据杠杆平衡条件得,2N×4l=F×2l,所以F=4N,所以在C处挂4个钩码.
在B点施加的力阻碍杠杆转动,B的力臂是2l,所以B点施加竖直向上的力的大小为4N.
(3)根据表格中的数据可归纳出杠杆平衡条件:动力×动力臂=阻力×阻力臂,即F1L1=F2L2.
(4)该组的同学只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律.力和力臂是两个不同的物理量,单位不同,不能相加.
故答案为:(1)平衡;左;左;水平;便于测量力臂大小;(2)个数;力臂;平衡;4;4;上;(3)动力×动力臂=阻力×阻力臂;(4)只测一组数据,得出结论具有偶然性,不具普遍性;不同单位的物理量不能相加.
点评 杠杆无论在水平位置静止还是在倾斜位置静止,杠杆只有是静止,杠杆就处于平衡状态,此处学生容易忽视.
杠杆平衡条件是杠杆平衡问题的重要依据,一个题目中可能多次用到杠杆平衡条件,一定要熟练掌握.

科目:初中物理 来源: 题型:填空题
 如图装置可以用来研究液体压强与流速的关系,打开阀门,水流经该装置时,可观察到a、b两管口均有水喷出,且b管口喷出的水柱更高,原因是b管下端管道横截面积大,水的流速小,压强大.
如图装置可以用来研究液体压强与流速的关系,打开阀门,水流经该装置时,可观察到a、b两管口均有水喷出,且b管口喷出的水柱更高,原因是b管下端管道横截面积大,水的流速小,压强大.查看答案和解析>>
科目:初中物理 来源: 题型:填空题
查看答案和解析>>
科目:初中物理 来源: 题型:实验探究题
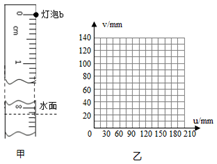 在探究光的折射规律时,从水面上方看水中的物体变浅了,为了确定水中物体所成像的位置,某学习小组进行了如下探究:
在探究光的折射规律时,从水面上方看水中的物体变浅了,为了确定水中物体所成像的位置,某学习小组进行了如下探究:| 30.0 | 60.0 | 90.0 | 120.0 | 150.0 | 180.0 | |
| 23.0 | 45.0 | 67.0 | 90.0 | 113.0 | 134.0 |
查看答案和解析>>
科目:初中物理 来源: 题型:填空题
查看答案和解析>>
科目:初中物理 来源: 题型:多选题
| A. | 你照镜子时,平面镜越小,像就越小 | |
| B. | 彩色电视画面上的色彩是由红、绿、蓝三种色光混合而成 | |
| C. | 近视眼镜是利用凹透镜使光线发散的特点矫正眼睛的 | |
| D. | 光在真空中的传播速度是3×105km/s |
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com




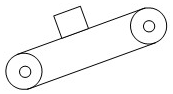 如图,货物随传送带匀速向下运动,请画出货物所受摩擦力的示意图.
如图,货物随传送带匀速向下运动,请画出货物所受摩擦力的示意图.