科目:初中物理 来源:物理教研室 题型:013
杠杆的平衡条件是
[ ]
A.动力+动力臂=阻力+阻力臂
B.动力-动力臂=阻力-阻力臂
C.动力×动力臂=阻力×阻力臂
D.动力÷动力臂=阻力÷阻力臂
查看答案和解析>>
科目:初中物理 来源: 题型:013
杠杆的平衡条件是
[
]A
.动力+动力臂=阻力+阻力臂B
.动力-动力臂=阻力-阻力臂C
.动力×动力臂=阻力×阻力臂D
.动力÷动力臂=阻力÷阻力臂查看答案和解析>>
科目:初中物理 来源: 题型:
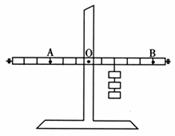
(10·达州)在研究杠杆平衡条件的实验中
(1)实验前没有挂钩码时,若杠杆右端下倾,则应将左端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)在如图所示的装置中,每个钩码重1N(杠杆上每格等距,杠杆自重不计),要使杠杆在水平位置平衡,小张在A处应挂 个1N重的钩码,而邻组的小强在B处施加一个竖直方向的力,也使杠杆在水平位置平衡,则这个力的方向应 ![]() ,大小为 N。
,大小为 N。
(3)本实验得出杠杆的平衡条件是 。
查看答案和解析>>
科目:初中物理 来源: 题型:
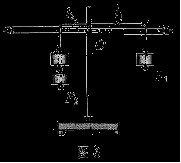
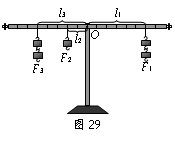
图29所示的实验装置可以探究杠杆受两个阻力(F2F3)时的平衡条件。在已调节好的杠杆两端挂上不同数量的钩码,并适当移动钩码的位置,使杠杆水平平衡,记下钩码的数量和位置。通过改变钩码的数量和位置,按照同样的方法再做两次,将实验得到的数据填在下表。表中数据是以一个钩码的重力为力的单位,以杠杆的每小格为长度的单位。
实验 次数 | 动力 F1 | 动力臂 l1 | 阻力 F2 | 阻力臂 l2 | 阻力 F3 | 阻力臂 l3 |
1 | 1 | 5 | 1 | 1 | 2 | 2 |
2 | 2 | 6 | 1 | 2 | 2 | 5 |
3 | 3 | 7 | 1 | 5 | 4 | 4 |
(1)分析表中的数据,可得杠杆的平衡条件是 。(填写关系式)
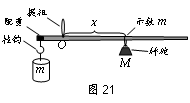
(2)在农村还广泛使用的杆秤就利用了上述原理。图21是一根杆秤的示意图。小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整。
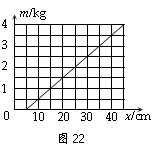
① 用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如图22所示。
② 用刻度尺测量挂钩到 的距离l;
③ 在m-x关系图象中任意读取两组数据x1m1和x2m2;
④ 设杆秤自重G0,重心到提扭的距离l0,据杠杆平衡条件 Mg x1 = + G0 l0
以及 = m2gl + G0 l0两式相减得 M= (要求用l、x1x2m1m2表示)。

查看答案和解析>>
科目:初中物理 来源: 题型:
图29所示的实验装置可以探究杠杆受两个阻力(F2、F3)时的平衡条件。在已调节好的杠杆两端挂上不同数量的钩码,并适当移动钩码的位置,使杠杆水平平衡,记下钩码的数量和位置。通过改变钩码的数量和位置,按照同样的方法再做两次,将实验得到的数据填在下表。表中数据是以一个钩码的重力为力的单位,以杠杆的每小格为长度的单位。
实验 次数 | 动力 F1 | 动力臂 l1 | 阻力 F2 | 阻力臂 l2 | 阻力 F3 | 阻力臂 l3 |
1 | 1 | 5 | 1 | 1 | 2 | 2 |
2 | 2 | 6 | 1 | 2 | 2 | 5 |
3 | 3 | 7 | 1 | 5 | 4 | 4 |
(1)分析表中的数据,可得杠杆的平衡条件是 。(填写关系式)
(2)在农村还广泛使用的杆秤就利用了上述原理。图21是一根杆秤的示意图。小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整。
① 用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如图22所示。
② 用刻度尺测量挂钩到 的距离l;
③ 在m-x关系图象中任意读取两组数据x1、m1和x2、m2;
④ 设杆秤自重G0,重心到提扭的距离l0,据杠杆平衡条件
Mg x1 = + G0 l0
以及 = m2gl + G0 l0
两式相减得 M= (要求用l、x1、x2、m1、m2表示)。
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com