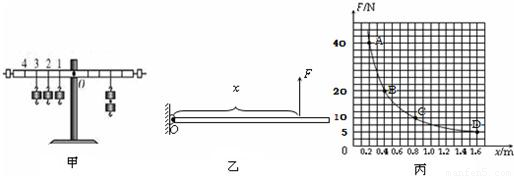
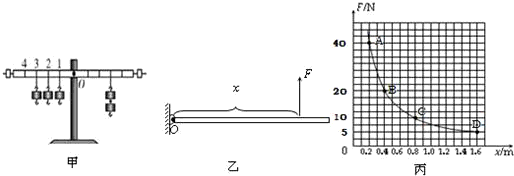
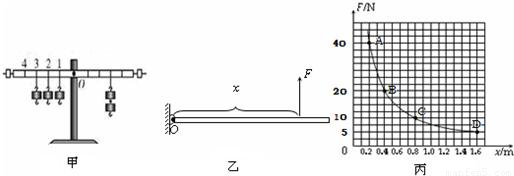
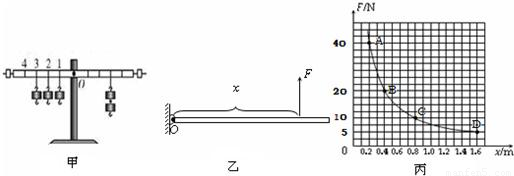
(1)某小组研究“杠杆的使用特点”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.实验中,在杠杆P点上挂三个相同的钩码,先后四次用弹簧测力计在Q位置沿不同方向向下拉杠杆,如图甲中A、B、C、D 所示,每次都能使杠杆在水平位置平衡.若以测力计的拉力为动力F
1,钩码对杠杆的作用力为阻力F
2,“动力的方向”用QR连线与测力计拉力方向所组成的夹角θ表示,且0°<θ≤90°.请仔细观察图甲中的操作和测量结果,然后归纳结论.

①实验前,应先调节杠杆在______位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出______.调节时,如发现杠杆左端偏高,应如何操作:______.
②分析比较图甲(A)、(B)与(D)的操作和弹簧测力计指针的位置,可得到的初步结论:阻力、阻力臂一定时,动力随动力臂增大而______(选填:增大或减小).
③分析比较图甲(A)、(B)、(C)和(D)的动力F
1的大小与动力方向之间的关系,可得到的初步结论:______.
④某次实验中,用如图乙所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式.这主要是以下哪种原因______(选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(2)如图丙所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一个“拉力--位移传感器”竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图丁所示.由图可知金属杆重______N.