 | 1 | 2 | 3 | 4 |
| L1/m | 0.1 | 0.15 | 0.2 | 0.2 |
| F1/N | 0.5 | 0.5 | 1.5 | 2 |
| L2/m | 0.05 | 0.05 | 0.1 | 0.1 |
| F2/N | 1 | 1.5 | 3 | 4 |
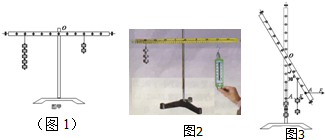
分析 (1)质地均匀的杠杆重心在中点,把支点放在中心,可以使杠杆自重的力臂为零,这样自身重力不影响杠杆平衡;杠杆和天平的平衡调节都遵循着“右偏左调,左偏右调”的原则,在水平位置平衡的目的,要从方便读力臂的角度考虑;
(2)根据杠杆平衡条件是F1L1=F2L2进行分析解答;
(3)杠杆的平衡条件是F1L1=F2L2,是阿基米德提出的;
(4)杠杆的平衡条件是:动力×动力臂=阻力×阻力臂,并根据力臂是从支点到力的作用线的距离进行判断
(5)分析F作用下其力臂变化情况,根据杠杆的平衡条件找到原因;
(6)分析并求出F在杠杆从竖直位置转过30°的过程中F水平移动距离,根据W=Fs计算拉力F做的功.
解答 解:(1)质地均匀的杠杆重心在中点,把支点放在中心,可以使杠杆自重的力臂为零,这样可以避免杠杆自重对实验的影响;根据“右偏左调”的原则,将平衡螺母向左调;钩码对杠杆的拉力是竖直向下的,在水平位置平衡时,力臂与杠杆重合,方便直接在杠杆上直接读出力臂大小.
(2)若每个钩码重为G,杠杆上每格长L,由图1,左侧力与力臂的乘积:5G×4L=20GL,右侧力与力臂的乘积:2G×3L=6GL,因为:20GL>6GL,所以杠杆左端下降;
如果不改变钩码总数和悬挂点位置,若要杠杆平衡,左侧取下n个钩码挂到右侧,则:(5-n)G×4L=(2+n)G×3L,解得:n=2,即需将左侧2个钩码挂到右侧即可;
(3)分析表中数据可知,杠杆的平衡条件是F1L1=F2L2,该结论最早是由古希腊的学者阿基米德提出的;
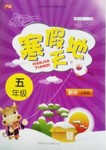
(4)杠杆的平衡条件是:动力×动力臂=阻力×阻力臂,力臂是从支点到力的作用线的距离,实验时只要将弹簧测力计沿倾斜方向拉动杠杆便可帮助小华解决了困惑;
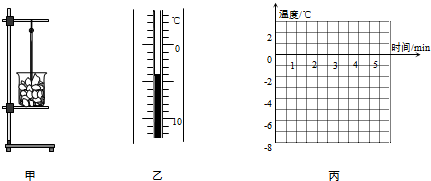
(5)由图将杠杆左侧的所有钩码拿掉,在A点施加一个始终水平向右的拉力F,当杠杆拉到水平位置时F的力臂通过支点,即力臂为0,根据杠杆的平衡条件所以始终不能平衡;
(6)由图杠杆从竖直位置转过30°的过程,F水平移动距离为OA长的一半,即s=$\frac{1}{2}$L,所以拉力F做的功:W=Fs=F×$\frac{1}{2}$L=$\frac{1}{2}$FL.
故答案为:(1)避免杠杆自重对实验的影响;左;便于测量力臂;(2)左;将左侧2个钩码挂到右侧钩码下方;(3)F1L1=F2L2;阿基米德;(4)沿倾斜方向拉动杠杆;(5)当杠杆在水平位置时,动力臂为零,杠杆无法平衡;(6)$\frac{1}{2}$FL.
点评 本题考查杠杆平衡条件实验中出现问题分析和杠杆平衡条件运用,关键是求出杠杆转动30°时水平拉力F水平移动距离.

 寒假天地重庆出版社系列答案
寒假天地重庆出版社系列答案科目:初中物理 来源: 题型:实验探究题
 如图所示的情景,是研究蒸发快慢与哪些因素有关的探究过程,这个探究方案中
如图所示的情景,是研究蒸发快慢与哪些因素有关的探究过程,这个探究方案中查看答案和解析>>
科目:初中物理 来源: 题型:选择题
 春节期间时常出现的雾霾天气引起人们对环境保护的高度关注,各地纷纷号召少开车,多走路,改善生活环境.如图所示,下列有关自行车的说法中正确的是( )
春节期间时常出现的雾霾天气引起人们对环境保护的高度关注,各地纷纷号召少开车,多走路,改善生活环境.如图所示,下列有关自行车的说法中正确的是( )| A. | 自行车水平匀速行驶时人对车的压力和车对人的支持力平衡 | |
| B. | 自行车的轮胎上刻有较深的花纹是为了减小摩擦 | |
| C. | 骑自行车上坡前用力蹬车时运动状态不变 | |
| D. | 骑自行车匀速下坡时机械能逐渐减小 |
查看答案和解析>>
科目:初中物理 来源: 题型:实验探究题
| 实验次数 | 木块放置 | 木块运动快慢 | 弹簧测力计的示数/N |
| 1 | 平放 | 很慢 | 2.2 |
| 2 | 平放 | 慢 | 2.2 |
| 3 | 平放 | 较快 | 2.2 |
查看答案和解析>>
科目:初中物理 来源: 题型:实验探究题

查看答案和解析>>
科目:初中物理 来源: 题型:实验探究题
| 时间/min | 0 | 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 6 | … |
| 温度/℃ | -8 | -6 | -2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 状态 | 固态 | 固液共存态 | ||||||||||
查看答案和解析>>
科目:初中物理 来源: 题型:填空题
查看答案和解析>>
科目:初中物理 来源: 题型:选择题
| A. | 误差是由于操作方法不正确产生 | |
| B. | 测量工具和测量人都会带来误差 | |
| C. | 只要态度端正,操作规范就不会产生误差 | |
| D. | 减小误差最主要的方法是尽可能选择精密的测量工具 |
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com