
分析 A:(1)①杠杆静止时或杠杆匀速转动时,杠杆处于平衡状态;
②使杠杆在水平位置平衡,便于测量力臂大小,杠杆的重心通过支点,消除杠杆重对杠杆平衡的影响,使实验简单化,便于探究;
(2)由图可见,拉力F1的方向与杠杆不垂直,因此力臂不等于支点到力的作用点的距离的,只有拉力方向与杠杆垂直时,拉力的力臂才等于支点到动力作用点的距离;
B:(1)使用杠杆克服钩码的重力做功,有用功等于克服钩码重力做的功,总功等于弹簧测力计的拉力做的功,机械效率等于有用功和总功的比值;
(2)从图中可以看出,将2只钩码悬挂在C点时,重力的力臂大于在B点重力的力臂,而动力臂不变,根据杠杆平衡的条件可知弹簧测力计的示数的变化情况,再分析有用功和额外功的变化,根据总功等于有用功和额外功之和得出弹簧测力计做功的变化情况.
解答 解:A:(1)杠杆静止时,杠杆处于平衡状态;图甲中,杠杆右高左低,应将右端的平衡螺母向右调节,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小,杠杆重心通过支点,可以消除杠杆自重对杠杆平衡的影响;
(2)图中,拉力F1的方向与水平杠杆不垂直,只有力的方向与杠杆垂直时,力臂才能从杠杆上直接读出来,小明误把杠杆的长度L1当成了拉力的力臂,所以小明会得出错误的结论;
B:(1)有用功为W有=Gh2=2mgh2,总功W总=F1h1,则机械效率的表达式η=$\frac{{W}_{有}}{{W}_{总}}$×100%=$\frac{2mg{h}_{2}}{{F}_{1}{h}_{1}}$×100%;
(2)钩码的悬挂点在B点时,由杠杠平衡条件得F1•OA=G•OB;悬挂点移至C点时,由杠杠的平衡条件得F2•OA=G•OC;从图可知,OB<OC,阻力臂变大,所以弹簧测力计的示数变大;
由于钩码数目不变,上升高度仍为h2,故有用功不变,但杠杆提升的高度减小,额外功减小,又因为总功等于额外功与有用功之和,总功变小,故此次杠杆的机械效率变大,即η′>η.
故答案为:A:(1)平衡; 右;水平;(2)F1的力臂测量错误;
B:(1)$\frac{2mg{h}_{2}}{{F}_{1}{h}_{1}}$×100%;(2)大于;大于.
点评 本题考查了杠杆平衡的条件,在实验中我们应首先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,以便直接读出力臂;用弹簧测力计时,应注意竖直方向拉动测力计;杠杆平衡的条件就是动力×动力臂=阻力×阻力臂.

 应用题作业本系列答案
应用题作业本系列答案科目:初中物理 来源: 题型:计算题
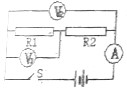 在图电路中,电源电压保持6伏不变,R1的电阻为20欧,R2的电阻为40欧,当电键闭合后求:
在图电路中,电源电压保持6伏不变,R1的电阻为20欧,R2的电阻为40欧,当电键闭合后求:查看答案和解析>>
科目:初中物理 来源: 题型:选择题
| A. | 把鸡蛋向碗边沿一磕,鸡蛋破了碗完好无损,说明碗对鸡蛋的力大于鸡蛋对碗的力 | |
| B. | 削面时,面条离开削面刀继续往前运动飞到锅里,面条是由于惯性飞出去的 | |
| C. | 饺子上捏出了漂亮的花边,是力改变了物体的形状 | |
| D. | 静止在水平面上的电饭锅受到的重力和桌面对它的支持力是一对平衡力 |
查看答案和解析>>
科目:初中物理 来源: 题型:实验探究题
 用如图所示的电路来探究串联电路的电压特点时.
用如图所示的电路来探究串联电路的电压特点时.| 实验次数 | U1/V | U2/V | U/V |
| 1 | 2.3 | 0.7 | 3.0 |
| 2 | 2.0 | 1.0 | 3.0 |
| 3 | 1.7 | 1.3 | 3.0 |
查看答案和解析>>
科目:初中物理 来源: 题型:多选题
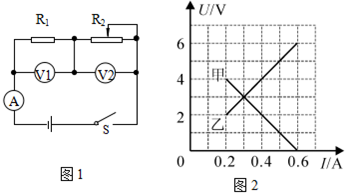
| A. | 甲是定值电阻R1的图象 | B. | 乙是定值电阻R1的图象 | ||
| C. | 电源电压是6V | D. | 定值电阻R1的阻值是10Ω |
查看答案和解析>>
科目:初中物理 来源: 题型:选择题
| A. | 人坐在向东行驶的汽车上看到路边的树木向西运动是以车为参照物 | |
| B. | 站在地球的人觉得地球同步卫星在空中静止不动是因为他以自己为参照物 | |
| C. | 飞机在空中加油时,若以受油机为参照物,加油机星是静止的 | |
| D. | 坐在顺流而下的竹排上看到两岸的山峰向后退去,是以岸为参照物 |
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
 如图所示,电源电压为10V,电压表V1的示数是6.5V,电压表V2的示数是5.5V,则L1两端的电压是2 V.
如图所示,电源电压为10V,电压表V1的示数是6.5V,电压表V2的示数是5.5V,则L1两端的电压是2 V.