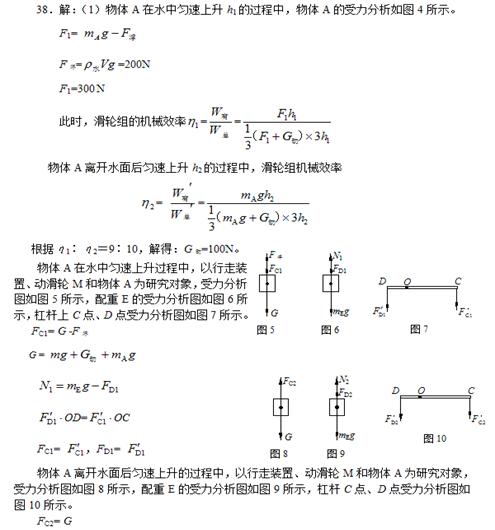
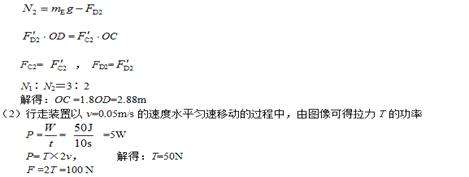
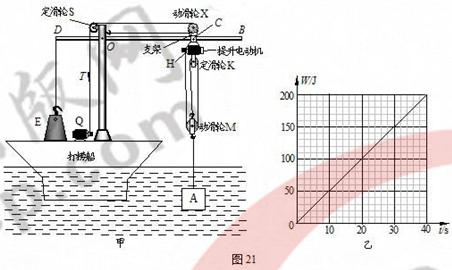
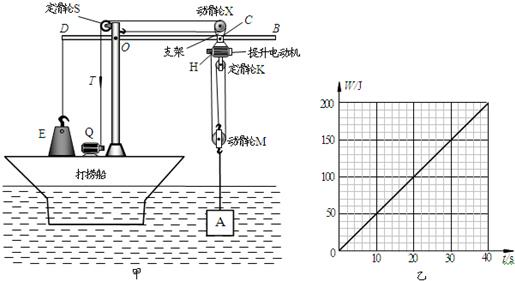
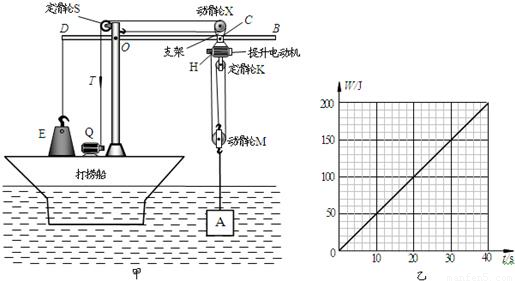
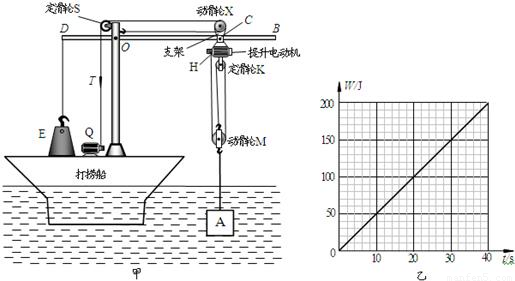
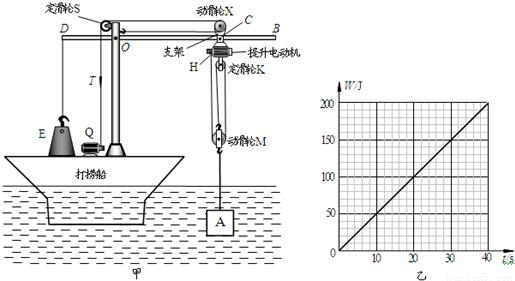
图21甲是海洋中学科技小组设计的打捞水中物体的装置示意图。DB是以O为转轴的水平杠杆,OD的长度为1.6m。水平甲板上的配重E通过细绳竖直拉着杠杆D端,配重E的质量mE为225kg。安装在杠杆DB上的行走装置由支架、动滑轮X、提升电动机、定滑轮K构成,行走装置的质量m为25kg。电动机Q可以通过定滑轮S和动滑轮X拉动行走装置沿BO水平滑动。固定在提升电动机的定滑轮K和动滑轮M组成滑轮组Y,当行走装置处于杠杆DB上C点的位置时,提升电动机拉动绳子H端,通过滑轮组Y竖直提升水中的物体A。物体A完全在水中匀速上升的过程中,滑轮Y的机械效率为η1,甲板对配重E的支持力为N1;物体A全部露出水面匀速竖直上升的过程中,,滑轮Y的机械效率为η2,甲板对配重E的支持力为N2。滑轮组Y提升物体A的过程中,行走装置受到的水平拉力始终为零,杠杆DB在水平位置保持平衡。已知物体A被的质量mA为50kg,体积V为20dm3,N1与N2之比为3:2,η1与η2之比为9:10。物体A被打捞出水面后,停留在一定高度,电动机Q开始拉动行走装置。在行走装置以0.05m/s的水平匀速移动的过程中,拉力T所做的功随时间变化的图像如图21乙所示,行走装置受到的水平拉力为F。细绳和杠杆的质量、滑轮与轴的摩擦、水对物体的阻力均忽略不计,g取10N/kg。
求:(1)OC的长度:(2)拉力F
 阅读快车系列答案
阅读快车系列答案科目:初中物理 来源: 题型:阅读理解
查看答案和解析>>
科目:初中物理 来源:2010-2011学年北京市苹果园中学八年级(下)期中物理试卷(解析版) 题型:解答题
查看答案和解析>>
科目:初中物理 来源:2013年河南省中考物理模拟试卷(五)(解析版) 题型:解答题
查看答案和解析>>
科目:初中物理 来源:2013年河南省中考物理模拟试卷(一)(解析版) 题型:解答题
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com