
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | 15 |
| 2 | 1 | 20 | 2 | 10 |
| 3 | 0.8 | 12.5 | 1 | 10 |
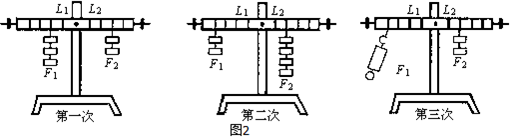
分析 (1)当杠杆在不挂钩码时处于水平平衡状态时,杠杆的重心在支点上,杠杆的重力力臂为0,避免了杠杆重力对杠杆平衡的影响;如果杠杆左端下沉,应向右调节平衡螺母,如果杠杆右端下沉,应向左调节平衡螺母,使杠杆在平衡位置平衡;
(2)利用杠杆的平衡条件F1L1=F2L2计算出右边的钩码所挂的位置,然后与现在的位置右边4格作比较,得出钩码应向右移动的格数;
(3)每个钩码重0.5N,数出第2次实验中钩码的个数,就得出阻力的大小;数出第2次实验中左侧动力臂的格数,得出动力臂大小;第3次实验中知道阻力、阻力臂、动力,根据杠杆平衡条件,求出动力臂;
(4)根据测量长度的仪器,可知需要刻度尺;根据杠杆的力臂要求,然后判断斜向下拉力的方向,画出动力的力臂.
解答 解:(1)在探究杠杆的平衡条件时,实验前首先应调节杠杆两端的螺母,直到杠杆在水平位置平衡.当杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,因此杠杆在水平位置平衡时,杠杆重力的力臂为零力臂就在杠杆上,方便直接在杠杆上读出力臂的大小;杠杆左端下沉,为了使杠杆在水平位置平衡,应将杠杆左端的螺母向右调,依据是减小力臂,杠杆左边部分的力和力臂乘积减少;
(2)利用杠杆的平衡条件计算,2G×3L=1G×L1,所以L1=6L,应将右边的钩码向右移动4格;
(3)第2次实验中杠杆右面挂了4个钩码,每个重0.5N,则阻力F2=0.5N×4=2N;左侧动力臂L1=5cm×4=20cm;
第3次实验中,根据杠杆平衡条件F1L1=F2L2得,
0.8N×L1=1N×10cm,
所以,L1=12.5cm;
(4)如图2所示,小明第三次实验使用了弹簧测力计和钩码,已经读出弹簧测力计的示数为0.8N,第三次实验的动力臂不在杠杆上,如果要测出第三次实验的动力臂,需要测量长度的仪器,刻度尺;
根据杠杆动力的力臂,由支点向动力的作用线作垂线,做出动力臂,作图如图所示: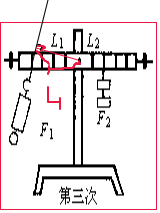
故答案为:(1)力臂就在杠杆上,方便直接在杠杆上读出力臂的大小;右;减小力臂,杠杆左边部分的力和力臂乘积减少;(2)右;4;(3)20;2;12.5;(4)刻度尺,作图如上图所示.
点评 此题是探究“杠杆的平衡条件”实验,考查了杠杆平衡条件的应用;在使用杠杆平衡条件时,要确定杠杆受到的力及对应的力臂,列出关系式代入数据便可求出未知.

 一线名师提优试卷系列答案
一线名师提优试卷系列答案科目:初中物理 来源: 题型:计算题
查看答案和解析>>
科目:初中物理 来源: 题型:计算题
查看答案和解析>>
科目:初中物理 来源: 题型:填空题
查看答案和解析>>
科目:初中物理 来源: 题型:解答题
查看答案和解析>>
科目:初中物理 来源: 题型:实验探究题
| 实测物体 | 物体质量m (kg) | 重力G (N) | 比值G/m (N/kg) | 比值G/m的 平均值(N/kg) |
| 物体A | 0.1 | 0.99 | 9.9 | _ |
| 物体B | 0.2 | 1.96 | 9.8 | |
| 物体C | 0.3 | 2.91 | 9.7 |
| 地点 | g值大小 | 地球纬度 | 地点 | g值大小 | 地球纬度 |
| 赤道 | 9.780 | 0° | 广州 | 9.788 | 23°06? |
| 武汉 | 9.794 | 30°33? | 上海 | 9.794 | 31°12? |
| 北京 | 9.801 | 39°56? | 纽约 | 9.803 | 40°41? |
| 莫斯科 | 9.816 | 55°45? | 北极 | 9.832 | 90° |
查看答案和解析>>
科目:初中物理 来源: 题型:填空题
查看答案和解析>>
科目:初中物理 来源: 题型:填空题

查看答案和解析>>
科目:初中物理 来源: 题型:填空题
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com