
| 实验次数 | 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 1 | 2 | 5 | 1 | 10 |
| 2 | 4 | 10 | 8 | 5 |
| 3 | 3 | 6 | 2 | 9 |
| 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 3 | 4 | 4 | 3 |
分析 (1)杠杆处于静止状态和匀速转动状态都称为杠杆平衡,为了使杠杆在水平位置平衡,平衡螺母向上翘的一端移动;探究杠杆平衡条件时,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂;
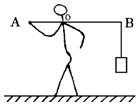
(2)根据阻力是阻碍杠杆转动的力,动力是使杠杆转动的力,确定B点和C点施加力的方向.根据杠杆平衡条件求出B、C点挂钩码数量;
(3)杠杆平衡条件:动力×动力臂=阻力×阻力臂(F1L1=F2L2).
(4)实验时,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律.
解答 解:(1)杠杆停在如图甲所示的位置,保持静止状态,杠杆处于平衡状态;要使杠杆在水平位置处于平衡状态,平衡螺母向上翘的左端移动;
杠杆在水平位置平衡,力臂在杠杆上,便于直接从杠杆上测量力臂;
(2)操作时,把钩码分别挂在杠杆的两侧,改变钩码的个数或在杠杆上的力臂的大小,使杠杆平衡.
设杠杆的一个小格是l,设右端挂钩码重为F,根据杠杆平衡条件得,2N×4l=F×2l,所以F=4N,所以在C处挂4个钩码.
(3)根据表格中的数据可归纳出杠杆平衡条件:动力×动力臂=阻力×阻力臂,即F1L1=F2L2.
(4)该组的同学只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律.力和力臂是两个不同的物理量,单位不同,不能相加.
故答案为:(1)平衡;左;水平;便于测量力臂; (2)4;(3)F1L1=F2L2;(4)一次实验具有偶然性.
点评 杠杆无论在水平位置静止还是在倾斜位置静止,杠杆只有是静止,杠杆就处于平衡状态,此处学生容易忽视;杠杆平衡条件是杠杆平衡问题的重要依据,一个题目中可能多次用到杠杆平衡条件,一定要熟练掌握

 备战中考寒假系列答案
备战中考寒假系列答案科目:初中物理 来源: 题型:选择题
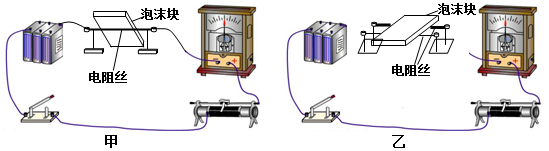
| A. | 增大导线两端的电压 | B. | 增大导线中的电流 | ||
| C. | 将导线对折后接入电路 | D. | 将导线拉长后接入电路 |
查看答案和解析>>
科目:初中物理 来源: 题型:实验探究题
| 材料 | 铜 | 铝 | 钨 | 镍铬合金 |
| 电阻(欧) | 0.0175 | 0.029 | 0.053 | 1.0 |
查看答案和解析>>
科目:初中物理 来源: 题型:填空题
查看答案和解析>>
科目:初中物理 来源: 题型:作图题
 如图所示,已知氢原子只有一个质子,一个电子,虚线表示氢原子核外电子的运动轨道.请在此图上完成氢原子的核式结构模型示意图,要求:用“+”、“-”分别表示原子核、电子,并标出原子核、电子的大致位置.
如图所示,已知氢原子只有一个质子,一个电子,虚线表示氢原子核外电子的运动轨道.请在此图上完成氢原子的核式结构模型示意图,要求:用“+”、“-”分别表示原子核、电子,并标出原子核、电子的大致位置.查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
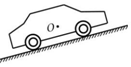
 如图所示,侧壁开有四个小孔的玻璃管中装有足量的水,同时打开小孔,则水从小孔a、b、c、d中喷出最远的是( )
如图所示,侧壁开有四个小孔的玻璃管中装有足量的水,同时打开小孔,则水从小孔a、b、c、d中喷出最远的是( )