 开心快乐假期作业暑假作业西安出版社系列答案
开心快乐假期作业暑假作业西安出版社系列答案 名题训练系列答案
名题训练系列答案科目:初中物理 来源: 题型:阅读理解
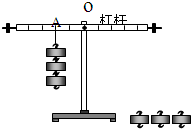 某同学在做“研究杠杆的平衡条件”实验中,(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,如图所示,此时可将右端螺母向
某同学在做“研究杠杆的平衡条件”实验中,(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,如图所示,此时可将右端螺母向| 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 3 | 4 | 4 | 3 |
查看答案和解析>>
科目:初中物理 来源: 题型:
查看答案和解析>>
科目:初中物理 来源: 题型:
| 实验次数 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 2 | 0.04 | 4 | 0.02 |
| 2 | 3 | 0.1 | 6 | 0.06 |
| 3 | 4 | 0.06 | 3 | 0.08 |
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
