
| F2×OB |
| 0C |
| 1.5N×20cm |
| 10cm |

科目:初中物理 来源: 题型:
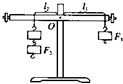 如图所示,是小明探究“杠杆平衡条件”的步骤:
如图所示,是小明探究“杠杆平衡条件”的步骤:| 实验序号 | 动力F1/N | 动力臂l1/m | 阻力F2/N | 阻力臂l2/m |
| 1 | 2 | 0.2 | 1 | 0.1 |
| 2 | 1 | 0.08 | 2 | 0.04 |
查看答案和解析>>
科目:初中物理 来源: 题型:
查看答案和解析>>
科目:初中物理 来源: 题型:
 回顾探究和实验:
回顾探究和实验:| 次数 | 钩码重/N | 钩码上升高度/m | 测力计示数/N | 测力计上升高度/m | 机械效率 |
| 1 | 1.0 | 0.2 | 0.5 | 0.6 | 66.7% |
| 2 | 2.0 | 0.2 | 0.9 | 0.6 | 74.1% |
| 3 | 3.0 | 0.2 | 1.1 | 0.6 |
查看答案和解析>>
科目:初中物理 来源: 题型:解答题

查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com