| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 0.5 | 10 | 1 | 5 |
| 2 | 0.5 | 15 | 1.5 | 5 |
| 3 | 1.5 | 20 | 3 | 10 |
| 4 | 2 | 20 | 4 | 10 |
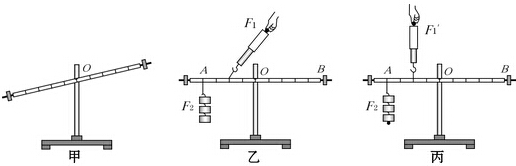
分析 (1)在调节杠杆平衡时,应将平衡螺母向较高的一端调节;
(2)探究杠杆平衡条件时,使杠杆在水平位置平衡,此时力的方向与杠杆垂直,力臂的长度可以直接从杠杆上读出来;
利用杠杆平衡条件判定图乙和图丙中两个力的大小;
(3)实验中收集多组数据可寻找普遍规律;根据力与力臂的乘积,最终可得出杠杆的平衡条件;
(4)天平是等臂杠杆,天平平衡时,左盘物体的质量等于右盘砝码的质量和游码的质量之和.
解答 解:
(1)为了便于测量力臂,应使杠杆在水平位置平衡,由图知,右端偏高,为使杠杆在水平位置平衡,需要将平衡螺母向右调节;
(2)力臂等于支点到力的作用线的距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来,因此丙实验设计的好,此时弹簧测力计的拉力与杠杆垂直,便于测量力臂;
图乙与图丙相比,阻力和阻力臂不变,动力臂变短,根据杠杆平衡条件可知,动力变大,即F1′<F1;
(3)在实验中,为避免实验结论的片面性、偶然性,要多做几次实验,对数据进行分析从而得到普遍性的规律;
分别计算动力和动力臂的乘积、阻力和阻力臂的乘积,可以发现杠杆的平衡条件是:动力×动力臂=阻力×阻力臂,即:F1•l1=F2•l2.
(4)天平的实质是等臂杠杆,所以物体质量等于砝码总质量与游码所对刻度之和.
故答案为:(1)右;(2)便于测量力臂;小于;(3)寻找普遍规律;F1L1=F2L2;(4)天平.
点评 本题考查了杠杆平衡的条件,杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,因此在此实验中我们应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,以便直接读出力臂.
当杠杆处于水平位置平衡时,竖直作用在杠杆上的力的力臂在杠杆上,倾斜作用在杠杆上力的力臂在杠杆以外的位置上,力臂变小.

科目:初中物理 来源: 题型:解答题

| 次数 | 1 | 2 | 3 | 4 | 5 | 6 |
| R2/Ω | 1 | 2 | 4 | 6 | 8 | 10 |
| I/A | 0.50 | 0.43 | 0.33 | 0.27 | 0.23 | 0.20 |
| P2/W | 0.25 | 0.37 | 0.44 | 0.44 | 0.42 | 0.40 |
查看答案和解析>>
科目:初中物理 来源: 题型:解答题
查看答案和解析>>
科目:初中物理 来源: 题型:解答题

| 实验次序 | 1 | 2 | 3 |
| U/V | 2.0 | 2.5 | 3.0 |
| I/A | 0.40 | 0.42 | |
| 亮度 | 逐渐变亮 | ||
查看答案和解析>>
科目:初中物理 来源: 题型:解答题
查看答案和解析>>
科目:初中物理 来源: 题型:解答题
 如图所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个.
如图所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个.查看答案和解析>>
科目:初中物理 来源: 题型:解答题
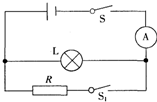 如图所示,电源电压恒定.小灯泡L标有“3V 0.6W”字样,R为定值电阻.闭合S,断开Sl,小灯泡正常发光;若再闭合S1,发现电流表示数变化了0.3A,则R的阻值为10Ω,此时灯泡L和电阻R消耗的功率之比是2:3,灯泡L和电阻R的阻值之比是3:2.
如图所示,电源电压恒定.小灯泡L标有“3V 0.6W”字样,R为定值电阻.闭合S,断开Sl,小灯泡正常发光;若再闭合S1,发现电流表示数变化了0.3A,则R的阻值为10Ω,此时灯泡L和电阻R消耗的功率之比是2:3,灯泡L和电阻R的阻值之比是3:2.查看答案和解析>>
科目:初中物理 来源: 题型:填空题
 如图表示白炽电灯将电能转化为光能和内能的大致比例,由此可计算白炽电灯的发光效率为10%.一般节能灯的发光效率为30%,它只要有20W的功率就能达到60W白炽电灯的亮度.与白炽电灯相比,该节能灯可以节约电能66.7%.
如图表示白炽电灯将电能转化为光能和内能的大致比例,由此可计算白炽电灯的发光效率为10%.一般节能灯的发光效率为30%,它只要有20W的功率就能达到60W白炽电灯的亮度.与白炽电灯相比,该节能灯可以节约电能66.7%.查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com