科目: 来源: 题型:
【题目】在探究杠杆平衡条件的实验中
(1)杠杆的平衡状态是指杠杆处于________或匀速转动状态。实验前没有挂钩码时,调节平衡螺母,使杠杆在水平位置平衡,其主要目的是___________________________。
(2)实验中,用装置A的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师建议同学不宜采用这种方式,该种方式的不足主要是因为( )
A.一个人无法独立操作
B.力臂与杠杆不重合
C.力和力臂数目过多,不易得出结论
D.杠杆受力不平衡
(3)若用装置B进行实验,则此时弹簧测力计的示数是________ N;将弹簧测力计沿虚线方向拉,仍然使杠杆在原来的位置平衡,此时拉力的力臂将_______,弹簧测力计的示数将_______ (均选填“变大”、“变小”或“不变”)。

查看答案和解析>>
科目: 来源: 题型:
【题目】在测小石块的密度实验中,小虎先用天平测小石块的质量(如图甲所示),再用量筒测小石块的体积(如图乙所示),求出小石块的密度![]() _____kg/m3虎测量另一小石块的质量时,错将小石块放在天平的右盘,砝码放在左盘,当天平平衡时,游码在标尺2g位置处,小虎没有发现这个错误,测量值____(填“大于”、“小于”或“等于”)小石块质量的真实值.
_____kg/m3虎测量另一小石块的质量时,错将小石块放在天平的右盘,砝码放在左盘,当天平平衡时,游码在标尺2g位置处,小虎没有发现这个错误,测量值____(填“大于”、“小于”或“等于”)小石块质量的真实值.

查看答案和解析>>
科目: 来源: 题型:
【题目】某实验小组在“测定滑轮组机械效率”的实验中得到的数据如下表所示,第1、2、3次实验装置分别如图甲、乙、丙所示.


(1)比较第1次实验和第2次实验可得结论:使用同样的滑轮组,提起的钩码越重,滑轮组的机械效率________.
(2)将表格补充完整______.比较第2次实验和第3次实验可得结论:使用不同的滑轮组提升相同的重物时,动滑轮的个数越多(动滑轮质量越大),滑轮组的机械效率______.
(3)如果不计绳重和摩擦,图丙中钩码重为4 N时,弹簧测力计的拉力为1 N,那么当钩码重为9 N时,该滑轮组的机械效率是________.
查看答案和解析>>
科目: 来源: 题型:
【题目】如图所示,工人用滑轮组匀速提升重800 N的货物,所用的拉力F为500 N,货物在50 s内匀速上升5 m.在此过程中所做的有用功是____J;拉力做功的功率是____W;滑轮组的机械效率是_____.
![]()
查看答案和解析>>
科目: 来源: 题型:
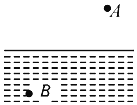
【题目】潜水者看岸边的观光者,看到的是_______(填“变矮”或“变高”)的_____(填“实像”或“虛像”).观光者发现B处有一块鹅卵石,若想从A处发射激光照到鹅卵石上,则激光应射向_______(填“B点”、“B点上方”或“B点下方”)。
查看答案和解析>>
科目: 来源: 题型:
【题目】如图,AB为能绕B点转动的轻质杠杆,中点C处用细线悬挂一重物,在A端施加一个竖直向上大小为10N的拉力F,使杠杆在水平位置保持平衡,则重物G=______N.若保持拉力方向不变,将A端缓慢向上提升一小段距离,在提升的过程中,拉力F将________; (选填“增大”、“不变”或“减小”)

查看答案和解析>>
科目: 来源: 题型:
【题目】如图所示,工人用滑轮或滑轮组提升重物,每只滑轮质量均相同.若把同一货物匀速提升相同的高度(不计绳子与滑轮间的摩擦),下列说法正确的是( )

A. 使用丙滑轮组与使用丁滑轮组一样省力
B. 使用丁滑轮组最省力
C. 机械效率最高的是丙滑轮组
D. 机械效率最高的是乙滑轮
查看答案和解析>>
科目: 来源: 题型:
【题目】如图所示,一束光会聚于b点,在虚线区城内放透镜甲后,光会聚于主光轴上的c点,在虚线区域内放透镜乙后,光会聚于主光轴上的a点,可判断透镜1是_______(填“凸透镜”或“凹透镜”)。现小虎想探究凸透镜成像特点,他将透镜固定在光具座上某位置(图中未标出),如图所示,当蜡烛从光具座上的M点移到N点并调整光屏的位置,发现光屏上的像逐渐变小,可判断此透镜位于_________(填“M点左侧”或“N点右侧”)。

查看答案和解析>>
科目: 来源: 题型:
【题目】如图所示,杠杆处于平衡状态,下列操作中能让杠杆继续保持平衡的是

A.将左右两边的钩码均向外移动一格
B.在左右两边钩码的下方各加一个钩码,位置保持不变
C.将左右两边的钩码各去掉一个,位置保持不变
D.将左边的钩码向里移动一格,同时将右边钩码去掉一个并保持位置不变
查看答案和解析>>
科目: 来源: 题型:
【题目】如图甲所示为一款能自动清扫地面的扫地机器人.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮采用凹凸材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.

表一:

机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,现测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体积.吸尘电机吸入功率与输入功率的比值叫做效率.
表二:

(1)机器人工作时,主机内部的气压___(选填“大于”、“小于”或“等于”)大气压而产生吸力.若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离为___cm.(设超声波在空气中的传播速度为340m/s)
(2)该机器人充满电后至下一次自动充电前,能够连续正常工作的最长时间为___min.
(3)由表二数据可知,当风量为0.015m3/s时,吸尘电机吸入功率为___W,若吸尘电机的输入功率为25W,此时其效率为___%.
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某机器人中吸尘电机内部的光敏电阻的控制电路,两端总电压U0恒定(U0<12V),RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为4.5V和2.25V,则R0=___Ω.
(5)若机器人1秒钟消耗的电能中有40%用于克服摩擦力做功.已知集尘盒空置时,机器人匀速运动时受到的摩擦阻力为16N,查阅资料显示摩擦力与压力成正比,则达到最大集尘量时机器人运动的速度为多少____?(写出必要计算步骤)
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com