科目: 来源: 题型:

查看答案和解析>>
科目: 来源: 题型:阅读理解

查看答案和解析>>
科目: 来源: 题型:
查看答案和解析>>
科目: 来源: 题型:
查看答案和解析>>
科目: 来源: 题型:
查看答案和解析>>
科目: 来源: 题型:
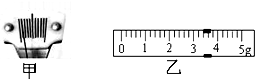 小明用天平和量杯测一块寿山石的质量.在调节天平时,发现指针偏向分度盘的左侧(如图甲所示),此时应将平衡螺母向
小明用天平和量杯测一块寿山石的质量.在调节天平时,发现指针偏向分度盘的左侧(如图甲所示),此时应将平衡螺母向查看答案和解析>>
科目: 来源: 题型:
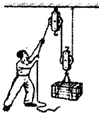 (2012?茂名)如图 所示,工人通过滑轮组使重600N 的箱子以0.4m/s 的速度从地面升到12m高的五楼上.求:
(2012?茂名)如图 所示,工人通过滑轮组使重600N 的箱子以0.4m/s 的速度从地面升到12m高的五楼上.求:查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com