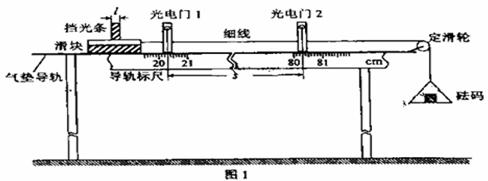
利用气垫导轨验证机械能守恒定律,实验装置示意图如图1所示:
(1)实验步骤![]() :
:
①将气垫导轨放在水平桌面上![]() ,桌面高度不低于1m,将导轨调至水平。
,桌面高度不低于1m,将导轨调至水平。
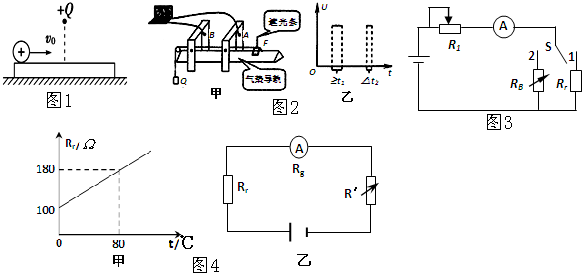
②用游标卡尺测量挡光条的宽度![]() ,结果如图2所示,由此读为
,结果如图2所示,由此读为![]() mm。
mm。
③由导轨标尺读出两光电门中心之间的距离s= cm。
④将滑块移至光电门1左侧某处,待砝码静止不动时,释放滑块,要求砝码落地前挡光条已通过光电门2。
⑤从数字计数器(图1中未画出)上分别读出挡光条通过光电门1和光电门2所用的时间![]() 。
。
⑥用天平称出滑块和挡光条的总质量M,再称出托盘和砝码的总质量m。
(2)有表示直接测量量的字母写出下列所求物理量的表达式:
①滑块通过光电门1和光电门2时瞬时速度分别为v1= 和v2= 。
②当滑块通过光电门1和光电门2时,系统(包括滑块、挡光条、托盘和砝码)的总动能分别为EK1= 和EK2= 。
③在滑块从光电门1运动到光电门2的过程中,系统势能的减少![]() = (重力加速度为g)。
= (重力加速度为g)。
(3)如果![]()
![]() ,则可认为验证了机械能守恒定律。
,则可认为验证了机械能守恒定律。
科目:高中物理 来源: 题型:

| l |
| △t1 |
| l |
| △t1 |
| l |
| △t2 |
| l |
| △t2 |
| 1 |
| 2 |
| l |
| △t1 |
| 1 |
| 2 |
| l |
| △t1 |
| 1 |
| 2 |
| l |
| △t2 |
| 1 |
| 2 |
| l |
| △t2 |
查看答案和解析>>
科目:高中物理 来源: 题型:

| 1 |
| 2 |
| d |
| △t2 |
| 1 |
| 2 |
| d |
| △t1 |
| 1 |
| 2 |
| d |
| △t2 |
| 1 |
| 2 |
| d |
| △t1 |
查看答案和解析>>
科目:高中物理 来源: 题型:阅读理解
查看答案和解析>>
科目:高中物理 来源: 题型:

| t | 1 |
| t | 2 |
| t | 1 |
| t | 2 |
查看答案和解析>>
科目:高中物理 来源: 题型:阅读理解
 (1)为测定一节干电池的电动势和内阻,用如图所示电路.
(1)为测定一节干电池的电动势和内阻,用如图所示电路.

查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
