科目: 来源: 题型:
【题目】下列关于物质结构的叙述中正确的是
A.天然放射性现象的发现表明了原子核内部是有复杂结构的
B.质子的发现表明了原子核都是由质子组成的
C.电子的发现表明了原子内部是有复杂结构的
D.α粒子散射实验是原子核式结构模型的实验基础
查看答案和解析>>
科目: 来源: 题型:
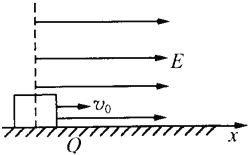
【题目】在一个水平面上建立x轴,在过原点O垂直于x轴的平面的右侧空间有一个匀强电场,场强大小E=6×105 N/C,方向与x轴正方向相同,在O处放一个质量m=10g带负电荷的绝缘小物块,其带电量q=5×10-8 C.小物块与水平面间的动摩擦因数μ=0.2,沿x轴正方向给物块一个初速度v0=2m/s,如图所示.试求:
(1)小物块沿x轴正方向运动离O点的最远距离;
(2)小物块最终停止时的位置.
查看答案和解析>>
科目: 来源: 题型:
【题目】由于银河系外某双黑洞系统的合并,北京时间2016年2月11日,美国国家科学基金会(NSF)宣布人类首次直接探测到了引力波,印证了爱因斯坦的预言.其实中国重大引力波探测工程“天琴计划”也已经于2015年7月份正式启动,“天琴计划”的其中一个阶段就是需要发射三颗地球高轨卫星进行引力波探测,假设我国发射的其中一颗高轨卫星以速度v沿圆形轨道环绕地球做匀速圆周运动,其周期为T,地球半径为R,引力常量为G,根据以上所给条件,试求:
(1)地球的质量M;
(2)地球的平均密度(已知球体体积V= ![]() πR3)
πR3)
查看答案和解析>>
科目: 来源: 题型:
【题目】要测绘一个标有“3V 1.5 W”小灯泡的伏安特性曲线,备有下列器材:
A.电压表(量程3 V,内阻约6 kΩ);
B.电压表(量程15 V,内阻约30 kΩ);
C.电流表(量程0.6 A,内阻约0.5 Ω);
D.电流表(量程3 A,内阻约0.1 Ω);
E.滑动变阻器(阻值范围0~5 Ω);
F.滑动变阻器(阻值范围0~100 Ω);
G.直流电源(3 V,内阻不计);
H.开关、导线若干。
(1) 要求多次测量并使电压表读数从零开始连续可调,上述器材中 电压表应选用________;电流表应选用________;滑动变阻器应选用________。(以上均填写器材前字母)
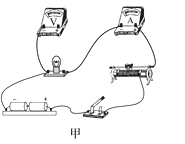
(2) 请将甲图中的实物电路图用笔代替导线补充完整_______。
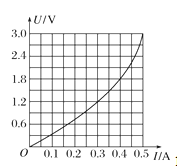
(3) 乙图为某同学根据正确的实验电路图所测的几组数据画出的U-I图象。图象是一条曲线而不是直线的原因是_________;从图象中可求得小灯泡电压为1.8 V时的小灯泡的实际功率为_______ W。
查看答案和解析>>
科目: 来源: 题型:
【题目】用相对论的观点判断,下列说法错误的是( )
A. 时间和空间都是绝对的,在任何参考系中一个事件发生的时间和一个物体的长度总不会改变
B. 在地面上的人看来,以10 km/s的速度运动的飞船中的时钟会变慢,但是飞船中的宇航员却看到时钟是准确的
C. 在地面上的人看来,以10km/s的速度运动的飞船在运动方向上会变窄,而飞船中的宇航员却感觉到地面上的人看起来比飞船中的人扁一些
D. 当物体运动的速度vc时,“时间膨胀”和“长度收缩”效果可忽略不计
查看答案和解析>>
科目: 来源: 题型:
【题目】气垫导轨上相隔一定距离的两处安装两个光电传感器A、B,滑块P上固定一遮光条,若光线被遮光条遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连。滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图象。
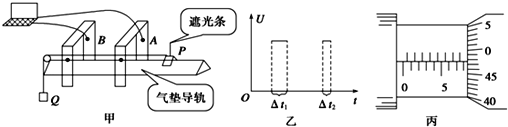
(1)实验前,按通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的△t1___△t2(选填“>”、“=”或“<”)时,说明气垫导轨已经水平。用螺旋测微器测遮光条宽度d,测量结果如图丙所示,则d =_______mm。
(2)将滑块P用细线跨过气垫导轨左端的定滑轮与质量为m的钩码Q相连,将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若△t1、△t2、m和d已知,要验证滑块和钩码组成的系统机械能是否守恒,还应测出______和__________(写出物理量的名称及符号)。
(3)若上述物理量间满足关系式________________________________,则表明在上述过程中,滑块和钩码组成的系统机械能守恒。(重力加速度为g)
(4)在对数据进行处理时,发现关系式两边结果并不严格相等,其原因可能是_______________。(写出一种即可)
查看答案和解析>>
科目: 来源: 题型:
【题目】某研究性学习小组利用气垫导轨验证机械能守恒定律,实验装置如图甲所示,当气垫导轨左侧工作时导轨两侧喷出的气体使滑块悬浮在导轨上方,滑块运动时与导轨间的阻力可忽略不计.在气垫导轨上相隔一定距离L的两处安装两个光电传感器A、B,滑块P上固定一遮光条,若光线被遮光条遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连.滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图线.
(1)当采用图甲的实验装置进行实验时,下列说法中正确的是
A.滑块P机械能守恒
B.钩码Q机械能守恒
C.在实验误差允许的范围内,滑块P和钩码Q组成的系统机械能守恒
D.以上三种说法都正确
(2)实验前,接通电源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的△t1△t2(选填“>”“=”或“<”)时,说明气垫导轨已经水平.
(3)滑块P用跨过气垫导轨左端的定滑轮的细线与质量为m的钩码Q相连,将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若△t1、△t2、遮光条宽度d、AB间距为L、滑块质量M、钩码质量m已知,若上述物理量间满足关系式 , 则表明在上述过程中,滑块和钩码组成的系统机械能守恒.
查看答案和解析>>
科目: 来源: 题型:
【题目】已知一些材料间动摩擦因数如下:
材料 | 钢—钢 | 木—木 | 木—金属 | 木—冰 |
动摩擦因数 | 0.25 | 0.30 | 0.20 | 0.03 |
质量为10 kg的物块放置于水平面上,现用弹簧秤沿水平方向匀速拉动此物块时,读得弹簧秤的示数为30N,则两接触面的材料可能是(取g=10 m/s2)( )
A.钢—钢
B.木—木
C.木—金属
D.木—冰
查看答案和解析>>
科目: 来源: 题型:
【题目】足够长光滑斜面BC的倾角![]() ,小物块与水平面间的动摩擦因数为0.5,水平面与斜面之间B点有一小段弧形连接,一质量m=2kg的小物块静止于A点。现在AB段对小物块施加与水平方向成
,小物块与水平面间的动摩擦因数为0.5,水平面与斜面之间B点有一小段弧形连接,一质量m=2kg的小物块静止于A点。现在AB段对小物块施加与水平方向成![]() 的恒力F作用,如图(a)所示,小物块在AB段运动的速度-时间图像如图(b)所示,到达B点迅速撤去恒力F。求:
的恒力F作用,如图(a)所示,小物块在AB段运动的速度-时间图像如图(b)所示,到达B点迅速撤去恒力F。求:

(1)小物块所受到的恒力F;
(2)小物块从B点沿斜面向上运动之后返回,小物块能否返回到A点?若能,计算小物块通过A点时的速度;若不能,计算小物块停止运动时离A点的距离。
查看答案和解析>>
科目: 来源: 题型:
【题目】某同学做“探究做功与速度变化的关系”的实验,如图所示,图中小车在一条橡皮筋的作用下弹出,沿木板滑行,这时,橡皮筋对小车做的功为W.当用2条,3条…相同的橡皮筋实验时,使每次实验中橡皮筋伸长的长度都保持一致.每次实验中小车获得的速度都由打点计时器所打的纸带测出.
(1)实验中小车会受到阻力,可以使木板适当倾斜来平衡摩擦力,需要在(填“左”或“右”)侧垫高木板.
(2)若粗糙的木板水平,小车在橡皮筋的作用下,当小车速度最大时,关于橡皮筋所处的状态与小车所在的位置可能是
A.橡皮筋处于原长状态
B.橡皮筋仍处于伸长状态
C.小车在两个铁钉连线处
D.小车已过两个铁钉连线处.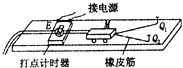
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com