题目列表(包括答案和解析)
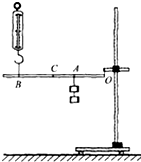
如图所示的装置处于平衡状态.已知: ,且
,且 =1∶4.不计滑轮重和摩擦,水平桌面对乙的支持力为F;若将甲浸没在水中,当此装置仍平衡时,水平桌面对乙的支持力为
=1∶4.不计滑轮重和摩擦,水平桌面对乙的支持力为F;若将甲浸没在水中,当此装置仍平衡时,水平桌面对乙的支持力为 ,求:F:的值.
,求:F:的值.

 某实验小组利用图所示装置研究杠杆的机械效率,实验的主要步骤如下:
某实验小组利用图所示装置研究杠杆的机械效率,实验的主要步骤如下:| Gh1 |
| Fh2 |
| Gh1 |
| Fh2 |


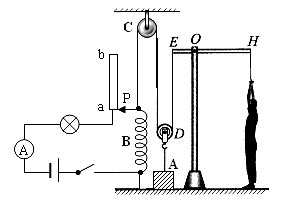
一绝缘细绳的一端与可绕O点转动的轻质杠杆的E端相连,另一端绕过滑轮D与C与滑动变阻器的滑片P相连;B为一可导电的轻质弹簧,如图所示接入电路中,一端通过绝缘绳固定在地面上,另一端与滑片P相连;一人站在地面上拉住与杠杆H端相连的细绳。已知电源电压为8V,灯泡标有“6V、3W”字样,人的质量为70kg,人与地面的接触面积为150cm2, 。当开关S闭合、人对绳子拉力最小时,电流表的示数为
。当开关S闭合、人对绳子拉力最小时,电流表的示数为 ,且滑片刚好位于滑动变阻器
,且滑片刚好位于滑动变阻器 的a端;当人对绳子拉力最大时,电流表示数为
的a端;当人对绳子拉力最大时,电流表示数为 ,且
,且 ,滑动变阻器的阻值与弹簧所受拉力的关系如下表所示:
,滑动变阻器的阻值与弹簧所受拉力的关系如下表所示:
|
|
0 |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
…… |
|
|
0.5 |
50.5 |
100.5 |
150.5 |
200.5 |
250.5 |
300.5 |
350.5 |
…… |
若不计杠杆、弹簧、滑片、细绳的重力,不计摩擦,不计弹簧电阻。整套装置始终处于平衡状态,物体A始终不离开地面。灯泡电阻不变,且不会被烧坏。取g=10N/kg。则下列选项中错误的是

A.人的拉力最大时,滑动变阻器接入电路的阻值是12Ω
B.物体A的质量是60kg
C.人的拉力最大时,人对地面的压强是
D.当灯泡正常发光时,物体A对地面的压力是400N
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
