第一部分 力&物体的平衡
第一讲 力的处理
一、矢量的运算
1、加法
表达: +
+  =
=  。
。
名词: 为“和矢量”。
为“和矢量”。
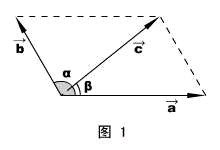
法则:平行四边形法则。如图1所示。
和矢量大小:c =  ,其中α为
,其中α为 和
和 的夹角。
的夹角。
和矢量方向: 在
在 、
、 之间,和
之间,和 夹角β= arcsin
夹角β= arcsin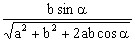
2、减法
表达: =
=  -
- 。
。
名词: 为“被减数矢量”,
为“被减数矢量”, 为“减数矢量”,
为“减数矢量”, 为“差矢量”。
为“差矢量”。
法则:三角形法则。如图2所示。将被减数矢量和减数矢量的起始端平移到一点,然后连接两时量末端,指向被减数时量的时量,即是差矢量。
差矢量大小:a =  ,其中θ为
,其中θ为 和
和 的夹角。
的夹角。
差矢量的方向可以用正弦定理求得。
一条直线上的矢量运算是平行四边形和三角形法则的特例。
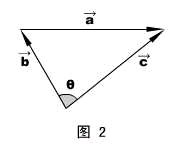
例题:已知质点做匀速率圆周运动,半径为R ,周期为T ,求它在 T内和在
T内和在 T内的平均加速度大小。
T内的平均加速度大小。
解说:如图3所示,A到B点对应 T的过程,A到C点对应
T的过程,A到C点对应 T的过程。这三点的速度矢量分别设为
T的过程。这三点的速度矢量分别设为 、
、 和
和 。
。
根据加速度的定义  =
=  得:
得: =
=  ,
, =
= 
由于有两处涉及矢量减法,设两个差矢量  =
=  -
- ,
, =
=  -
- ,根据三角形法则,它们在图3中的大小、方向已绘出(
,根据三角形法则,它们在图3中的大小、方向已绘出( 的“三角形”已被拉伸成一条直线)。
的“三角形”已被拉伸成一条直线)。
本题只关心各矢量的大小,显然:
 =
=  =
=  =
=  ,且:
,且: =
= 
 =
=  ,
, = 2
= 2 =
= 
所以: =
=  =
=  =
=  ,
, =
=  =
=  =
=  。
。
(学生活动)观察与思考:这两个加速度是否相等,匀速率圆周运动是不是匀变速运动?
答:否;不是。
3、乘法
矢量的乘法有两种:叉乘和点乘,和代数的乘法有着质的不同。
⑴ 叉乘
表达: ×
× =
= 
名词: 称“矢量的叉积”,它是一个新的矢量。
称“矢量的叉积”,它是一个新的矢量。
叉积的大小:c = absinα,其中α为 和
和 的夹角。意义:
的夹角。意义: 的大小对应由
的大小对应由 和
和 作成的平行四边形的面积。
作成的平行四边形的面积。
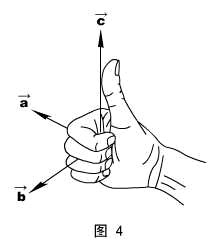
叉积的方向:垂直 和
和 确定的平面,并由右手螺旋定则确定方向,如图4所示。
确定的平面,并由右手螺旋定则确定方向,如图4所示。
显然, ×
× ≠
≠ ×
× ,但有:
,但有: ×
× = -
= - ×
×
⑵ 点乘
表达: ·
· = c
= c
名词:c称“矢量的点积”,它不再是一个矢量,而是一个标量。
点积的大小:c = abcosα,其中α为 和
和 的夹角。
的夹角。
二、共点力的合成
1、平行四边形法则与矢量表达式
2、一般平行四边形的合力与分力的求法
余弦定理(或分割成RtΔ)解合力的大小
正弦定理解方向
三、力的分解
1、按效果分解
2、按需要——正交分解
第二讲 物体的平衡
一、共点力平衡
1、特征:质心无加速度。
2、条件:Σ = 0 ,或
= 0 ,或  = 0 ,
= 0 , = 0
= 0
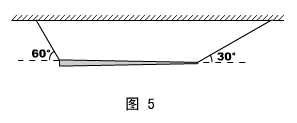
例题:如图5所示,长为L 、粗细不均匀的横杆被两根轻绳水平悬挂,绳子与水平方向的夹角在图上已标示,求横杆的重心位置。
解说:直接用三力共点的知识解题,几何关系比较简单。
答案:距棒的左端L/4处。
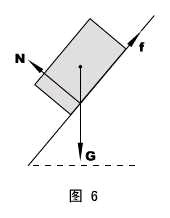
(学生活动)思考:放在斜面上的均质长方体,按实际情况分析受力,斜面的支持力会通过长方体的重心吗?
解:将各处的支持力归纳成一个N ,则长方体受三个力(G 、f 、N)必共点,由此推知,N不可能通过长方体的重心。正确受力情形如图6所示(通常的受力图是将受力物体看成一个点,这时,N就过重心了)。
答:不会。
二、转动平衡
1、特征:物体无转动加速度。
2、条件:Σ = 0 ,或ΣM+ =ΣM-
= 0 ,或ΣM+ =ΣM-
如果物体静止,肯定会同时满足两种平衡,因此用两种思路均可解题。
3、非共点力的合成
大小和方向:遵从一条直线矢量合成法则。
作用点:先假定一个等效作用点,然后让所有的平行力对这个作用点的和力矩为零。
第三讲 习题课
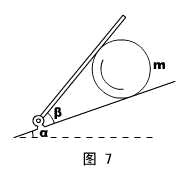
1、如图7所示,在固定的、倾角为α斜面上,有一块可以转动的夹板(β不定),夹板和斜面夹着一个质量为m的光滑均质球体,试求:β取何值时,夹板对球的弹力最小。
解说:法一,平行四边形动态处理。
对球体进行受力分析,然后对平行四边形中的矢量G和N1进行平移,使它们构成一个三角形,如图8的左图和中图所示。
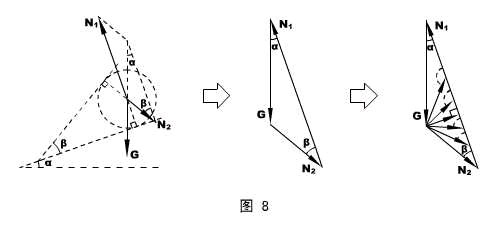
由于G的大小和方向均不变,而N1的方向不可变,当β增大导致N2的方向改变时,N2的变化和N1的方向变化如图8的右图所示。
显然,随着β增大,N1单调减小,而N2的大小先减小后增大,当N2垂直N1时,N2取极小值,且N2min = Gsinα。
法二,函数法。
看图8的中间图,对这个三角形用正弦定理,有:
 =
=  ,即:N2 =
,即:N2 =  ,β在0到180°之间取值,N2的极值讨论是很容易的。
,β在0到180°之间取值,N2的极值讨论是很容易的。
答案:当β= 90°时,甲板的弹力最小。
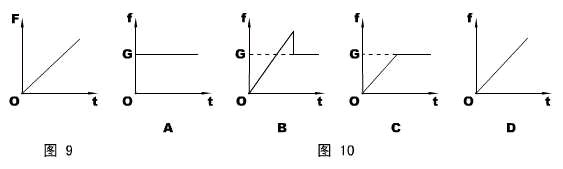
2、把一个重为G的物体用一个水平推力F压在竖直的足够高的墙壁上,F随时间t的变化规律如图9所示,则在t = 0开始物体所受的摩擦力f的变化图线是图10中的哪一个?
解说:静力学旨在解决静态问题和准静态过程的问题,但本题是一个例外。物体在竖直方向的运动先加速后减速,平衡方程不再适用。如何避开牛顿第二定律,是本题授课时的难点。
静力学的知识,本题在于区分两种摩擦的不同判据。
水平方向合力为零,得:支持力N持续增大。
物体在运动时,滑动摩擦力f = μN ,必持续增大。但物体在静止后静摩擦力f′≡ G ,与N没有关系。
对运动过程加以分析,物体必有加速和减速两个过程。据物理常识,加速时,f < G ,而在减速时f > G 。
答案:B 。
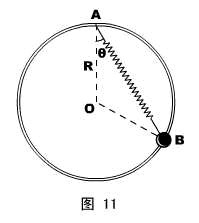
3、如图11所示,一个重量为G的小球套在竖直放置的、半径为R的光滑大环上,另一轻质弹簧的劲度系数为k ,自由长度为L(L<2R),一端固定在大圆环的顶点A ,另一端与小球相连。环静止平衡时位于大环上的B点。试求弹簧与竖直方向的夹角θ。
解说:平行四边形的三个矢量总是可以平移到一个三角形中去讨论,解三角形的典型思路有三种:①分割成直角三角形(或本来就是直角三角形);②利用正、余弦定理;③利用力学矢量三角形和某空间位置三角形相似。本题旨在贯彻第三种思路。
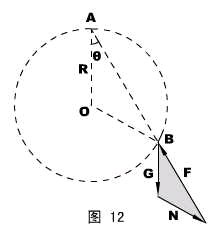
分析小球受力→矢量平移,如图12所示,其中F表示弹簧弹力,N表示大环的支持力。
(学生活动)思考:支持力N可不可以沿图12中的反方向?(正交分解看水平方向平衡——不可以。)
容易判断,图中的灰色矢量三角形和空间位置三角形ΔAOB是相似的,所以:
 ⑴
⑴
由胡克定律:F = k( - R) ⑵
- R) ⑵
几何关系: = 2Rcosθ ⑶
= 2Rcosθ ⑶
解以上三式即可。

答案:arccos 。
。
(学生活动)思考:若将弹簧换成劲度系数k′较大的弹簧,其它条件不变,则弹簧弹力怎么变?环的支持力怎么变?
答:变小;不变。
(学生活动)反馈练习:光滑半球固定在水平面上,球心O的正上方有一定滑轮,一根轻绳跨过滑轮将一小球从图13所示的A位置开始缓慢拉至B位置。试判断:在此过程中,绳子的拉力T和球面支持力N怎样变化?
解:和上题完全相同。
答:T变小,N不变。
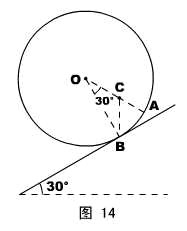
4、如图14所示,一个半径为R的非均质圆球,其重心不在球心O点,先将它置于水平地面上,平衡时球面上的A点和地面接触;再将它置于倾角为30°的粗糙斜面上,平衡时球面上的B点与斜面接触,已知A到B的圆心角也为30°。试求球体的重心C到球心O的距离。
解说:练习三力共点的应用。
根据在平面上的平衡,可知重心C在OA连线上。根据在斜面上的平衡,支持力、重力和静摩擦力共点,可以画出重心的具体位置。几何计算比较简单。
答案: R 。
R 。
(学生活动)反馈练习:静摩擦足够,将长为a 、厚为b的砖块码在倾角为θ的斜面上,最多能码多少块?
解:三力共点知识应用。
答: 。
。
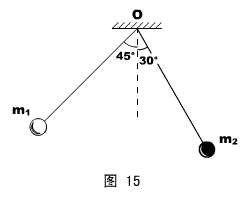
4、两根等长的细线,一端拴在同一悬点O上,另一端各系一个小球,两球的质量分别为m1和m2 ,已知两球间存在大小相等、方向相反的斥力而使两线张开一定角度,分别为45和30°,如图15所示。则m1 : m2??为多少?
解说:本题考查正弦定理、或力矩平衡解静力学问题。
对两球进行受力分析,并进行矢量平移,如图16所示。
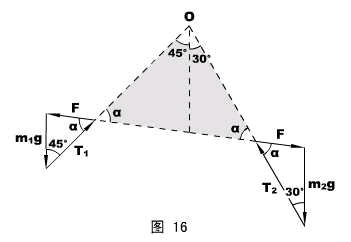
首先注意,图16中的灰色三角形是等腰三角形,两底角相等,设为α。
而且,两球相互作用的斥力方向相反,大小相等,可用同一字母表示,设为F 。
对左边的矢量三角形用正弦定理,有:
 =
=  ①
①
同理,对右边的矢量三角形,有: =
=  ②
②
解①②两式即可。
答案:1 : 。
。
(学生活动)思考:解本题是否还有其它的方法?
答:有——将模型看成用轻杆连成的两小球,而将O点看成转轴,两球的重力对O的力矩必然是平衡的。这种方法更直接、简便。
应用:若原题中绳长不等,而是l1 :l2 = 3 :2 ,其它条件不变,m1与m2的比值又将是多少?
解:此时用共点力平衡更加复杂(多一个正弦定理方程),而用力矩平衡则几乎和“思考”完全相同。
答:2 :3 。
。
5、如图17所示,一个半径为R的均质金属球上固定着一根长为L的轻质细杆,细杆的左端用铰链与墙壁相连,球下边垫上一块木板后,细杆恰好水平,而木板下面是光滑的水平面。由于金属球和木板之间有摩擦(已知摩擦因素为μ),所以要将木板从球下面向右抽出时,至少需要大小为F的水平拉力。试问:现要将木板继续向左插进一些,至少需要多大的水平推力?
解说:这是一个典型的力矩平衡的例题。
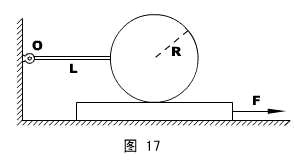
以球和杆为对象,研究其对转轴O的转动平衡,设木板拉出时给球体的摩擦力为f ,支持力为N ,重力为G ,力矩平衡方程为:
f R + N(R + L)= G(R + L) ①
球和板已相对滑动,故:f = μN ②
解①②可得:f = 
再看木板的平衡,F = f 。
同理,木板插进去时,球体和木板之间的摩擦f′=  = F′。
= F′。
答案: 。
。
第四讲 摩擦角及其它
一、摩擦角
1、全反力:接触面给物体的摩擦力与支持力的合力称全反力,一般用R表示,亦称接触反力。
2、摩擦角:全反力与支持力的最大夹角称摩擦角,一般用φm表示。
此时,要么物体已经滑动,必有:φm = arctgμ(μ为动摩擦因素),称动摩擦力角;要么物体达到最大运动趋势,必有:φms = arctgμs(μs为静摩擦因素),称静摩擦角。通常处理为φm = φms 。
3、引入全反力和摩擦角的意义:使分析处理物体受力时更方便、更简捷。
二、隔离法与整体法
1、隔离法:当物体对象有两个或两个以上时,有必要各个击破,逐个讲每个个体隔离开来分析处理,称隔离法。
在处理各隔离方程之间的联系时,应注意相互作用力的大小和方向关系。
2、整体法:当各个体均处于平衡状态时,我们可以不顾个体的差异而讲多个对象看成一个整体进行分析处理,称整体法。
应用整体法时应注意“系统”、“内力”和“外力”的涵义。
三、应用
1、物体放在水平面上,用与水平方向成30°的力拉物体时,物体匀速前进。若此力大小不变,改为沿水平方向拉物体,物体仍能匀速前进,求物体与水平面之间的动摩擦因素μ。
解说:这是一个能显示摩擦角解题优越性的题目。可以通过不同解法的比较让学生留下深刻印象。
法一,正交分解。(学生分析受力→列方程→得结果。)
法二,用摩擦角解题。
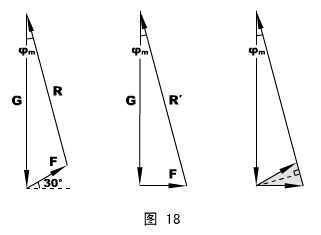
引进全反力R ,对物体两个平衡状态进行受力分析,再进行矢量平移,得到图18中的左图和中间图(注意:重力G是不变的,而全反力R的方向不变、F的大小不变),φm指摩擦角。
再将两图重叠成图18的右图。由于灰色的三角形是一个顶角为30°的等腰三角形,其顶角的角平分线必垂直底边……故有:φm = 15°。
最后,μ= tgφm 。
答案:0.268 。
(学生活动)思考:如果F的大小是可以选择的,那么能维持物体匀速前进的最小F值是多少?
解:见图18,右图中虚线的长度即Fmin ,所以,Fmin = Gsinφm 。
答:Gsin15°(其中G为物体的重量)。
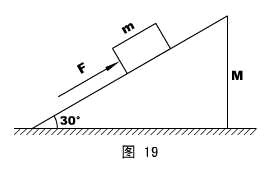
2、如图19所示,质量m = 5kg的物体置于一粗糙斜面上,并用一平行斜面的、大小F = 30N的推力推物体,使物体能够沿斜面向上匀速运动,而斜面体始终静止。已知斜面的质量M = 10kg ,倾角为30°,重力加速度g = 10m/s2 ,求地面对斜面体的摩擦力大小。
解说:
本题旨在显示整体法的解题的优越性。
法一,隔离法。简要介绍……
法二,整体法。注意,滑块和斜面随有相对运动,但从平衡的角度看,它们是完全等价的,可以看成一个整体。
做整体的受力分析时,内力不加考虑。受力分析比较简单,列水平方向平衡方程很容易解地面摩擦力。
答案:26.0N 。
(学生活动)地面给斜面体的支持力是多少?
解:略。
答:135N 。
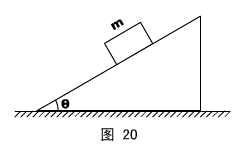
应用:如图20所示,一上表面粗糙的斜面体上放在光滑的水平地面上,斜面的倾角为θ。另一质量为m的滑块恰好能沿斜面匀速下滑。若用一推力F作用在滑块上,使之能沿斜面匀速上滑,且要求斜面体静止不动,就必须施加一个大小为P = 4mgsinθcosθ的水平推力作用于斜面体。使满足题意的这个F的大小和方向。
解说:这是一道难度较大的静力学题,可以动用一切可能的工具解题。
法一:隔离法。
由第一个物理情景易得,斜面于滑块的摩擦因素μ= tgθ
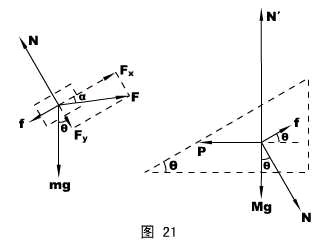
对第二个物理情景,分别隔离滑块和斜面体分析受力,并将F沿斜面、垂直斜面分解成Fx和Fy ,滑块与斜面之间的两对相互作用力只用两个字母表示(N表示正压力和弹力,f表示摩擦力),如图21所示。
对滑块,我们可以考查沿斜面方向和垂直斜面方向的平衡——
Fx = f + mgsinθ
Fy + mgcosθ= N
且 f = μN = Ntgθ
综合以上三式得到:
Fx = Fytgθ+ 2mgsinθ ①
对斜面体,只看水平方向平衡就行了——
P = fcosθ+ Nsinθ
即:4mgsinθcosθ=μNcosθ+ Nsinθ
代入μ值,化简得:Fy = mgcosθ ②
②代入①可得:Fx = 3mgsinθ
最后由F = 解F的大小,由tgα=
解F的大小,由tgα=  解F的方向(设α为F和斜面的夹角)。
解F的方向(设α为F和斜面的夹角)。
答案:大小为F = mg ,方向和斜面夹角α= arctg(
,方向和斜面夹角α= arctg( )指向斜面内部。
)指向斜面内部。
法二:引入摩擦角和整体法观念。
仍然沿用“法一”中关于F的方向设置(见图21中的α角)。
先看整体的水平方向平衡,有:Fcos(θ- α) = P ⑴
再隔离滑块,分析受力时引进全反力R和摩擦角φ,由于简化后只有三个力(R、mg和F),可以将矢量平移后构成一个三角形,如图22所示。
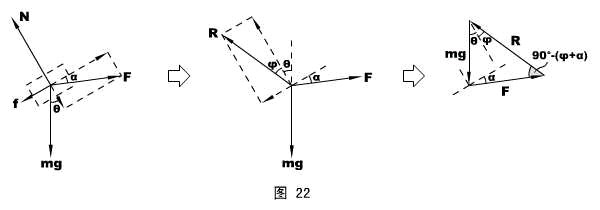
在图22右边的矢量三角形中,有: =
=  =
=  ⑵
⑵
注意:φ= arctgμ= arctg(tgθ) = θ ⑶
解⑴⑵⑶式可得F和α的值。
