探究杠杆的平衡条件
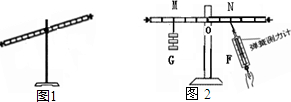
(1)如图1所示,若杠杆在使用前左端低,右端高,要使它在水平位置平衡,应将杠杆右端的螺母向
右
右
(填“左”或“右”)调节至平衡.杠杆平衡后,在整个实验过程中
不可以
不可以
(填“可以”或“不可以”)再旋动两侧的螺母.
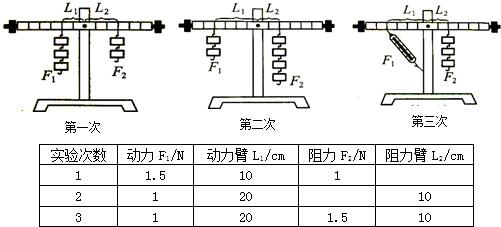
(2)下列实验步骤中
A、调节杠杆两端的平衡螺母,使杠杆在水平位置平衡.
B、计算每次实验中F
1×L
1和F
2×L
2的大小,根据计算结果得出杠杆的平衡条件.
C、改变钩码的个数和位置,重复实验.
D、记下动力F
1、动力臂L
1、阻力F
2和阻力臂L
2的大小,将数据填入表格中.
E、将钩码挂在杠杆的支上点两边,先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置重新平衡.
正确的顺序是
AEDCB
AEDCB
(填序号).
(3)如图2若斜向下拉动弹簧测力计使杠杆处于水平位置平衡,此时钩码总重力为G,测力计的拉力为F,则G×OM
<
<
F×ON.(填“>”“<”或“=”)
(4)如图3甲,某次实验时杠杆处于水平平衡状态,悬挂在A、B两点的钩码个数(虚线框内)未画出.若在两端再同时挂上相等质量的小球(如图3乙),则杠杆
①
①
.若将甲图中左右两端的钩码各自向外侧移动一小格(如图3丙),则杠杆
②
②
(以上两空选填序号:①右端下降 ②左端下降 ③仍水平静止)