题目列表(包括答案和解析)
 (2011?安徽模拟)小明同学探究杠杆平衡条件:(不考虑摩擦)
(2011?安徽模拟)小明同学探究杠杆平衡条件:(不考虑摩擦)| 实验序号 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂L2(cm) |
| 1 | 2 | 4 | 2 | 4 |
| 2 | 4 | 6 | 3 | 8 |
| 3 | 8 | 4 | 6 |
小明同学探究杠杆平衡条件:(不考虑杠杆自重和摩擦)
(1)实验前没有挂钩码时,小明发现杠杆停止时左侧下沉,此时杠杆处于 (填“平衡”或“不平衡”)状态,则应将左端的平衡螺母向 调,使杠杆 。
(2)三次实验数据记录表格如下:
| 实验序号 | 动力F1(牛) | 动力臂L1(厘米) | 阻力F2(牛) | 阻力臂L2(厘米) |
| 1 | 2 | 4 | 2 | 4 |
| 2 | 4 | 6 | 3 | 8 |
| 3 |
| 8 | 4 | 6 |
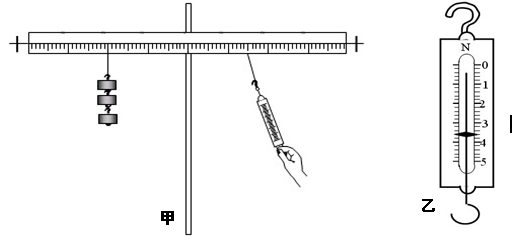
①小明用如图甲所示进行第3次实验,弹簧测力计的所示如图乙所示,则动力F1= N
②分析三次实验数据,发现第3次实验中弹簧测力计示数偏大,检测弹簧测力计发现完好无损,原因可能是 。
(3)小明通过实验探究,得出了杠杆平衡条件。生活中的镊子应用了该实验中的第 次实验原理。
小明同学探究杠杆平衡条件:(不考虑杠杆自重和摩擦)
(1)实验前没有挂钩码时,小明发现杠杆停止时左侧下沉,此时杠杆处于 (填“平衡”或“不平衡”)状态,则应将左端的平衡螺母向 调,使杠杆 。
(2)三次实验数据记录表格如下:
|
实验序号 |
动力F1(牛) |
动力臂L1(厘米) |
阻力F2(牛) |
阻力臂L2(厘米) |
|
1 |
2 |
4 |
2 |
4 |
|
2 |
4 |
6 |
3 |
8 |
|
3 |
|
8 |
4 |
6 |
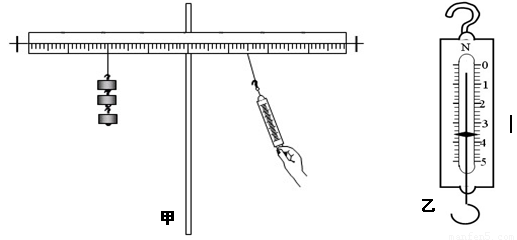
①小明用如图甲所示进行第3次实验,弹簧测力计的所示如图乙所示,则动力F1= N
②分析三次实验数据,发现第3次实验中弹簧测力计示数偏大,检测弹簧测力计发现完好无损,原因可能是 。
(3)小明通过实验探究,得出了杠杆平衡条件。生活中的镊子应用了该实验中的第 次实验原理。

| 实验序号 | 动力F1(牛) | 动力臂L1(厘米) | 阻力F2(牛) | 阻力臂L2(厘米) |
| 1 | 2 | 4 | 2 | 4 |
| 2 | 4 | 6 | 3 | 8 |
| 3 | 8 | 4 | 6 |
| 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 4 | 5 | 5 | 4 |
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 0.5 | 8 | 1 | |
| 2 | 6 | 1.5 | 8 |
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com