题目列表(包括答案和解析)
二、要点梳理
实测 物体 | 物体质量 m(kg) | 重力 G(N) | 比值G/m (N/kg) | 比值G/m的平均值 (N/kg) |
物体1 | 0.1 | 0.99 | 9.9 | |
物体2 | 0.2 | 1.96 | 9.8 | |
物体3 | 0.3 | 2.91 | 9.7 |
2、受力分析是解决力学问题必备的一项最基本技能。①通常对物体进行受力分析的次序是按重力、弹力、摩擦力进行的;分析中要求做到不遗漏力,不多增力。②要做到不遗漏力,不多增力,可以从这几个方面着手:A按这些力的产生条件进行判断它们是否存在;B学会运用物体处于平衡时,应满足的力的平衡关系来确定一些力的存在以及大小。
3、杠杆的特征:①判断一个物体是不是杠杆,需要满足三个条件,即硬物体(不一定是棒)、受力(动力和阻力)和转动(绕固定点)。杠杆可以是直的也可以是弯的甚至是任意形状的,只要在力的作用下能绕固定点转动,且是硬物体,都可称为杠杆。②力臂的画法:确定支点O的位置;对杠杆进行受力分析,画出力的作用线;过支点向力的作用线作垂线。③因为使用任何机械都不能省功,因此既省力又省距离的杠杆是不存在的。
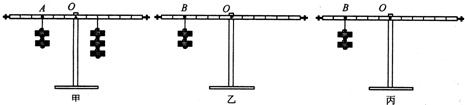
4、关于杠杆的平衡条件F1L1=F2L2;(1)杠杆平衡是指杠杆处于静止或匀速转动,不一定是水平位置静止。(2)应用杠杆平衡条件解题的三步骤①依题找出杠杆的五要素:支点、动力、阻力、动力臂、阻力臂。②明确题目给出的已知条件③根据平衡条件F1L1=F2L2列式求解。
5、滑轮组:①滑轮组用几段绳子吊着物体,提起物体所用的力就是物体与动滑轮总重量的几分之一,绳子自由端移动的距离就是物体升高高度的几倍。②承担总重量的“几段绳子”的确定:看直接与动滑轮接触的(包括栓在动滑轮框的)总共有几根。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com