题目列表(包括答案和解析)
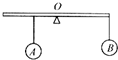 一根粗细均匀的杠杆可绕中点O自由转动.杆上挂有质量不等的物体A和B,此时杠杆处于平衡状态,如图所示,现将物体A、B同时向支点移动相同的距离,此时杠杆将( )
一根粗细均匀的杠杆可绕中点O自由转动.杆上挂有质量不等的物体A和B,此时杠杆处于平衡状态,如图所示,现将物体A、B同时向支点移动相同的距离,此时杠杆将( )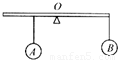
 一根粗细均匀的杠杆可绕中点O自由转动.杆上挂有质量不等的物体A和B,此时杠杆处于平衡状态,如图所示,现将物体A、B同时向支点移动相同的距离,此时杠杆将
一根粗细均匀的杠杆可绕中点O自由转动.杆上挂有质量不等的物体A和B,此时杠杆处于平衡状态,如图所示,现将物体A、B同时向支点移动相同的距离,此时杠杆将



湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com