小明和小红利用如图甲所示装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
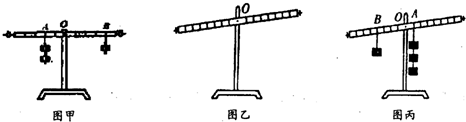
(1)如图乙,为使杠杆在水平位置平衡,应将左端的平衡螺母向
右
右
(选填“左”或“右”)移动,将杠杆调整在水平位置的目的是为了方便测量
力臂大小
力臂大小
.
(2)小明在实验中记录了三次实验数据如下表:
| 次数/实验 |
动力F1/N |
动力臂L1/cm |
阻力F2/N |
阻力臂L2/cm |
| 1 |
1.0 |
10 |
0.5 |
15 |
| 2 |
2.0 |
10 |
1.0 |
20 |
| 3 |
2.0 |
20 |
4.0 |
10 |
这三次实验数据中有一次是错误的,错误数据的实验次数是
1
1
,由正确实验结果可得杠杆的平衡条件是
F1L1=F2L2
F1L1=F2L2
.
(3)小红调节好平衡后,在杠杆两端挂上钩码,杠杆的状态如图丙所示,为此,小红又调节两端的平衡螺母,使杠杆重新回到水平平衡位置,然后正确记录下钩码重、动力臂OA和阻力臂OB的值,分析实验数据后发现得不到教材中的“杠杆的平衡条件”,小红的哪一步操作导致了实验结果与教材中的结论不一致?答:
杠杆上挂钩码后,小红又调节了平衡螺母
杠杆上挂钩码后,小红又调节了平衡螺母
.
(4)有同学用现有实验方案得到如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论与杠杆的平衡条件不符,原因是实验过程中
B
B
.
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.