题目列表(包括答案和解析)
| d |
| △t1 |
| d |
| △t2 |
| d |
| △t1 |
| d |
| △t2 |



| L |
| t1 |
| L |
| t1 |
| L |
| t2 |
| L |
| t2 |
| 次 数 |
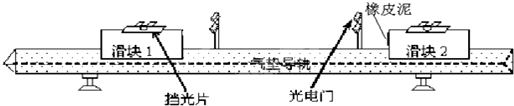
滑块1 | 滑块2 | 碰前系统动量kgms-1 | 碰后系统动量kgms-1 | |||
| v1/ms-1 | v/ms-1 | v2/ms-1 | v/ms-1 | m1v1 | m2v2 | (m1+m2)v | |
| 1 | 0.290 | 0.184 | 0 | 0.184 | 0.0940 0.0940 |
0 | 0.0929 0.0929 |
| 2 | 0.426 | 0.269 | 0 | 0.269 | 0.138 0.138 |
0 | 0.136 0.136 |
| 实验结论: 在误差允许范围内,系统碰撞前后动量矢量和相等,即系统动量守恒 在误差允许范围内,系统碰撞前后动量矢量和相等,即系统动量守恒 | |||||||
| L |
| t1 |
| L |
| t2 |
| L |
| t1 |
| L |
| t2 |
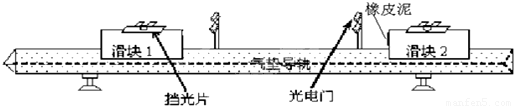
| 次 数 |
滑块1 | 滑块2 | 碰前系统动量kgms-1 | 碰后系统动量kgms-1 | |||
| v1/ms-1 | v/ms-1 | v2/ms-1 | v/ms-1 | m1v1 | m2v2 | (m1+m2)v | |
| 1 | 0.290 | 0.184 | 0 | 0.184 | ______ | 0 | ______ |
| 2 | 0.426 | 0.269 | 0 | 0.269 | ______ | 0 | ______ |
| 实验结论:______ | |||||||
| 次 数 | 滑块1 | 滑块2 | 碰前系统动量kgms-1 | 碰后系统动量kgms-1 | |||
| v1/ms-1 | v/ms-1 | v2/ms-1 | v/ms-1 | m1v1 | m2v2 | (m1+m2)v | |
| 1 | 0.290 | 0.184 | 0.184 | ||||
| 2 | 0.426 | 0.269 | 0.269 | ||||
| 实验结论: | |||||||
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com