题目列表(包括答案和解析)
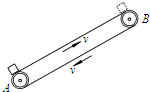

 (2011?厦门模拟)风能是一种环保型的可再生能源.据勘测,厦门沿海蕴藏大量的风能,具有很大的开发前景.设某一小型风力发电机输出U=250V稳定的直流电压,它只给如图所示的皮带传送装置的电动机(电动机未画出)供电.已知电动机的额定电压U额=250V,额定功率Pm=500W,线圈电阻R=5.0Ω.传送带两端A、B之间距离s=10m,高度差h=4.0m.在运送货箱的过程中,传送带的运行速度始终保持v2=1.0m/s不变.不计输电导线的电阻和皮带传送装置各部分的摩擦损耗.重力加速度g取10m/s2.求
(2011?厦门模拟)风能是一种环保型的可再生能源.据勘测,厦门沿海蕴藏大量的风能,具有很大的开发前景.设某一小型风力发电机输出U=250V稳定的直流电压,它只给如图所示的皮带传送装置的电动机(电动机未画出)供电.已知电动机的额定电压U额=250V,额定功率Pm=500W,线圈电阻R=5.0Ω.传送带两端A、B之间距离s=10m,高度差h=4.0m.在运送货箱的过程中,传送带的运行速度始终保持v2=1.0m/s不变.不计输电导线的电阻和皮带传送装置各部分的摩擦损耗.重力加速度g取10m/s2.求
| 1 |
| 2 |
| d |
| △t2 |
| 1 |
| 2 |
| d |
| △t1 |
| 1 |
| 2 |
| d |
| △t2 |
| 1 |
| 2 |
| d |
| △t1 |
某研究性学习小组利用气垫导轨进行验证机械能守恒定律实验,实验装置如图甲所示。将气垫导轨水平放置,在气垫导轨上相隔一定距离的两点处安装两个光电传感器A、B,滑块P上固定有遮光条,若光线被遮光条遮挡,光电传感器会输出高电平,两光电传感器再通过一个或门电路与计算机相连。滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电平随时间变化的图象。
⑴实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,则图乙中的Δt1、Δt2间满足 关系,则说明气垫导轨已经水平。
⑵用游标卡尺测遮光条宽度d ,测量结果如图丙所示,则d = mm。 
图丙
(3)用细线通过气垫导轨左端的定滑轮将滑块P与质量为m的钩码Q相连,将滑块P由如图甲所示位置释放,通过计算机得到的图像如图乙所示,若Δt1、Δt2和d已知,要验证机械能是否守恒,还应测出 (写出物理量的名称及符号)。
(4)若上述物理量间满足关系式 ,则表明在滑块和砝码的运动过程中,系统的机械能守恒。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com