题目列表(包括答案和解析)
利用计算机和力传感器可以比较精确地测量作用在挂钩上的力,并能得到挂钩所受的拉力随时间的变化图像,实验过程中挂钩位置可认为不变。某同学利用力传感器和单摆来验证机械能守恒,实验步骤如下:
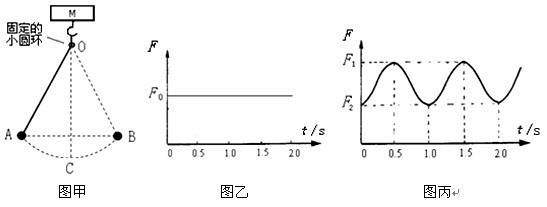
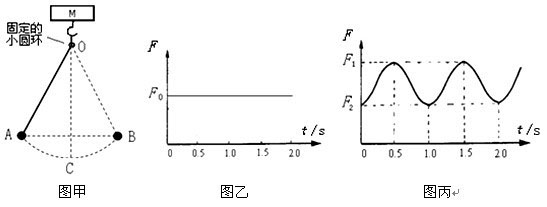
①如图甲所示,固定力传感器M,并在挂钩的正下方固定一个小圆环(环中的光滑小孔O刚好够一根细线穿过)。
②取一根不可伸长的细线,一端固定一个小铁球,另一端穿过小孔O固定在传感器的挂钩上。
③让小铁球处于静止状态,从计算机中得到拉力随时间的关系图像如图乙所示。
④让小球以较小的角度在竖直平面内的A、B之间摆动,从计算机中得到拉力随时间的关系图像如图丙所示。
请回答以下问题:
(1)由图中数据可求得小孔O到小铁球球心的距离为 m。(计算时取g≈π2)
(2)为了验证小球在最高点A和最低点C处的机械能是否相等,则( )
A.一定得测出小球的质量m
B.一定得测出细线离开竖直方向的最大偏角β
C.一定得知道当地重力加速度g的大小
D.只要知道图中的F0、F1、F2的大小
(3)若已经用实验测得了第(2)小题中所需测量的物理量,则为了验证小球在最高点A和最低点C处的机械能是否相等,只需验证等式 是否成立。(用题中所给物理量的符号来表示)
利用计算机和力传感器可以比较精确地测量作用在挂钩上的力,并能得到挂钩所受的拉力随时间的变化图像,实验过程中挂钩位置可认为不变。某同学利用力传感器和单摆来验证机械能守恒,实验步骤如下:
①如图甲所示,固定力传感器M,并在挂钩的正下方固定一个小圆环(环中的光滑小孔O刚好够一根细线穿过)。
②取一根不可伸长的细线,一端固定一个小铁球,另一端穿过小孔O固定在传感器的挂钩上。
③让小铁球处于静止状态,从计算机中得到拉力随时间的关系图像如图乙所示。
④让小球以较小的角度在竖直平面内的A、B之间摆动,从计算机中得到拉力随时间的关系图像如图丙所示。
请回答以下问题:
(1)由图中数据可求得小孔O到小铁球球心的距离为 m。(计算时取g≈π2)
(2)为了验证小球在最高点A和最低点C处的机械能是否相等,则( )
A.一定得测出小球的质量m
B.一定得测出细线离开竖直方向的最大偏角β
C.一定得知道当地重力加速度g的大小
D.只要知道图中的F0、F1、F2的大小
(3)若已经用实验测得了第(2)小题中所需测量的物理量,则为了验证小球在最高点A和最低点C处的机械能是否相等,只需验证等式 是否成立。(用题中所给物理量的符号来表示)
利用计算机和力传感器可以比较精确地测量作用在挂钩上的力,并能得到挂钩所受的拉力随时间的变化图像,实验过程中挂钩位置可认为不变。某同学利用力传感器和单摆来验证机械能守恒,实验步骤如下:
①如图甲所示,固定力传感器M,并在挂钩的正下方固定一个小圆环(环中的光滑小孔O刚好够一根细线穿过)。
②取一根不可伸长的细线,一端固定一个小铁球,另一端穿过小孔O固定在传感器的挂钩上。
③让小铁球处于静止状态,从计算机中得到拉力随时间的关系图像如图乙所示。
④让小球以较小的角度在竖直平面内的A、B之间摆动,从计算机中得到拉力随时间的关系图像如图丙所示。
请回答以下问题:
(1)由图中数据可求得小孔O到小铁球球心的距离为 m。(计算时取g≈π2)
(2)为了验证小球在最高点A和最低点C处的机械能是否相等,则( )
A.一定得测出小球的质量m
B.一定得测出细线离开竖直方向的最大偏角β
C.一定得知道当地重力加速度g的大小
D.只要知道图中的F0、F1、F2的大小
(3)若已经用实验测得了第(2)小题中所需测量的物理量,则为了验证小球在最高点A和最低点C处的机械能是否相等,只需验证等式 是否成立。(用题中所给物理量的符号来表示)
利用计算机和力传感器可以比较精确地测量作用在挂钩上的力,并能得到挂钩所受的拉力随时间的变化图像,实验过程中挂钩位置可认为不变。某同学利用力传感器和单摆来验证机械能守恒,实验步骤如下:
①如图甲所示,固定力传感器M,并在挂钩的正下方固定一个小圆环(环中的光滑小孔O刚好够一根细线穿过)。
②取一根不可伸长的细线,一端固定一个小铁球,另一端穿过小孔O固定在传感器的挂钩上。
③让小铁球处于静止状态,从计算机中得到拉力随时间的关系图像如图乙所示。
④让小球以较小的角度在竖直平面内的A、B之间摆动,从计算机中得到拉力随时间的关系图像如图丙所示。
 请回答以下问题:
请回答以下问题:
(1)由图中数据可求得小孔O到小铁球球心的距离为 ▲ m。(计算时取g≈π2)
(2)为了验证小球在最高点A和最低点C处的机械能是否相等,则( )
A.一定得测出小球的质量m
B.一定得测出细线离开竖直方向的最大偏角β
C.一定得知道当地重力加速度g的大小
D.只要知道图中的F0、F1、F2的大小
(3)若已经用实验测得了第(2)小题中所需测量的物理量,则为了验证小球在最高点A和最低点C处的机械能是否相等,只需验证等式 ▲ 是否成立。(用题中所给物理量的符号来表示)
利用计算机和力传感器可以比较精确地测量作用在挂钩上的力,并能得到挂钩所受的拉力随时间的变化图像,实验过程中挂钩位置可认为不变。某同学利用力传感器和单摆来验证机械能守恒,实验步骤如下:
①如图甲所示,固定力传感器M,并在挂钩的正下方固定一个小圆环(环中的光滑小孔O刚好够一根细线穿过)。
②取一根不可伸长的细线,一端固定一个小铁球,另一端穿过小孔O固定在传感器的挂钩上。
③让小铁球处于静止状态,从计算机中得到拉力随时间的关系图像如图乙所示。
④让小球以较小的角度在竖直平面内的A、B之间摆动,从计算机中得到拉力随时间的关系图像如图丙所示。
请回答以下问题:
(1)由图中数据可求得小孔O到小铁球球心的距离为 m。(计算时取g≈π2)
(2)为了验证小球在最高点A和最低点C处的机械能是否相等,则( )
A.一定得测出小球的质量m
B.一定得测出细线离开竖直方向的最大偏角β
C.一定得知道当地重力加速度g的大小
D.只要知道图中的F0、F1、F2的大小
(3)若已经用实验测得了第(2)小题中所需测量的物理量,则为了验证小球在最高点A和最低点C处的机械能是否相等,只需验证等式 是否成立。(用题中所给物理量的符号来表示)
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com