A.如图所示是研究物体做匀变速直线运动规律时得到的一条纸带(实验中打点计时器所接低压交流电源的频率为50Hz),从O点后开始每5个计时点取一个记数点,依照打点的先后顺序依次编号为0、1、2、3、4、5、6,测得x
1=5.18cm,x
2=4.40cm,x
3=3.60cm,x
4=2.78cm,x
5=2.00cm,x
6=1.20cm.(结果保留两位有效数字)
(1)物体的加速度大小a=
0.80
0.80
m/s
2;
(2)打点计时器打记数点3时,物体的速度大小为v
3=
0.32
0.32
m/s.
B.如图2为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(1)在该实验中必须采用控制变量法,应保持
小车质量
小车质量
不变,用钩码所受的重力作为
小车受到的合力
小车受到的合力
,用DIS测小车的加速度.
(2)改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组数据可画出a-F关系图线(如图3所示).
①分析此图线的OA段可得出的实验结论是
在小车质量一定的情况下,小车的加速度与其所受到的合力成正比
在小车质量一定的情况下,小车的加速度与其所受到的合力成正比
.
②(单选题)此图线的AB段明显偏离直线,造成此误差的主要原因是
C
C
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大.

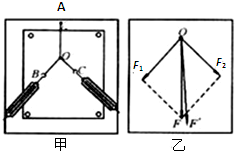 (2011?闵行区一模)“研究共点力的合成”的实验情况如图甲所示,其中A为固定橡皮筋的图钉,O为橡皮筋与细绳的结点,OB和OC为细绳,图乙是在白纸上根据实验结果画出的图示.
(2011?闵行区一模)“研究共点力的合成”的实验情况如图甲所示,其中A为固定橡皮筋的图钉,O为橡皮筋与细绳的结点,OB和OC为细绳,图乙是在白纸上根据实验结果画出的图示.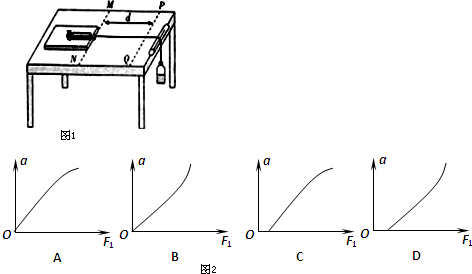
 如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作: