题目列表(包括答案和解析)
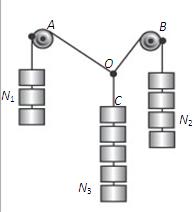
有同学利用如图的装置来验证力的平行四边形定则:在竖直木板上铺有白纸,固定两个光滑的滑轮A和B,将绳子打一个结点O,每个钩码的重量相等,当系统达到平衡时,根据钩码个数读出三根绳子的拉力TOA、TOB和TOC,回答下列问题:
①改变钩码个数,实验不能完成的是( )
A.钩码的个数![]() ,
,![]()
B.钩码的个数![]() ,
,![]()
C.钩码的个数![]()
D.钩码的个数![]() ,
,![]() ,
,![]()
②在拆下钩码和绳子前,最重要的一个步骤是( )
A.标记结点O的位置,并记录OA、OB、OC三段绳子的方向
B.量出OA、OB、OC三段绳子的长度
C.用量角器量出三根绳子之间的夹角
D.用天平测出钩码的质量
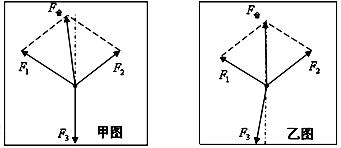
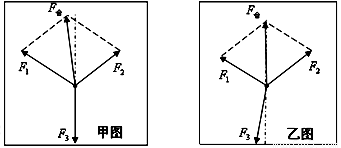
③在作图时,下图中更加符合实际的图是 图.(填“甲”或“乙”)
(2)探究小车加速度与外力、质量关系的实验装置如下图甲所示。

①把带有滑轮的长木板左端垫高,在没有牵引的情况下让小车拖着纸带以一定的初速度沿木板运动,打点计时器在纸带打出一行计时点,如果计时点间距 ,就说明摩擦力和小车重力沿木板向下的分力平衡。
② 某同学在做实验中,使用![]() 交变电流作电源,在打出的纸带上选择5个计数点A、B、C、D、E,相邻两个计数点之间还有4个点没有画出,他测量了
交变电流作电源,在打出的纸带上选择5个计数点A、B、C、D、E,相邻两个计数点之间还有4个点没有画出,他测量了![]() 点到
点到![]() 点、和
点、和![]() 点到C点的距离,如下图乙所示。则纸带上C点的速度VC= ,重物的加速度为____ 。(结果保留三位有效数字)
点到C点的距离,如下图乙所示。则纸带上C点的速度VC= ,重物的加速度为____ 。(结果保留三位有效数字)
有同学利用如图的装置来验证力的平行四边形定则:在竖直木板上铺有白纸,固定两个光滑的滑轮A和B,将绳子打一个结点O,每个钩码的重量相等,当系统达到平衡时,根据钩码个数读出三根绳子的拉力TOA、TOB和TOC,回答下列问题:
①改变钩码个数,实验不能完成的是( )
A.钩码的个数,
B.钩码的个数,
C.钩码的个数
D.钩码的个数,
,
②在拆下钩码和绳子前,最重要的一个步骤是( )
A.标记结点O的位置,并记录OA、OB、OC三段绳子的方向
B.量出OA、OB、OC三段绳子的长度
C.用量角器量出三根绳子之间的夹角
D.用天平测出钩码的质量
③在作图时,下图中更加符合实际的图是 图.(填“甲”或“乙”)
(2)(10分)探究小车加速度与外力、质量关系的实验装置如下图甲所示。
①把带有滑轮的长木板左端垫高,在没有牵引的情况下让小车拖着纸带以一定的初速度沿木板运动,打点计时器在纸带打出一行计时点,如果计时点间距 ,就说明摩擦力和小车重力沿木板向下的分力平衡。
② 某同学在做实验中,使用交变电流作电源,在打出的纸带上选择5个计数点A、B、C、D、E,相邻两个计数点之间还有4个点没有画出,他测量了
点到
点、和
点到C点的距离,如下图乙所示。则纸带上C点的速度VC= ,重物的加速度为____ 。(结果保留三位有效数字)
有同学利用如图的装置来验证力的平行四边形定则:在竖直木板上铺有白纸,固定两个光滑的滑轮A和B,将绳子打一个结点O,每个钩码的重量相等,当系统达到平衡时,根据钩码个数读出三根绳子的拉力TOA、TOB和TOC,回答下列问题:

①改变钩码个数,实验不能完成的是( )
A.钩码的个数 ,
,
B.钩码的个数 ,
,
C.钩码的个数
D.钩码的个数 ,
, ,
, 
②在拆下钩码和绳子前,最重要的一个步骤是( )
A.标记结点O的位置,并记录OA、OB、OC三段绳子的方向
B.量出OA、OB、OC三段绳子的长度
C.用量角器量出三根绳子之间的夹角
D.用天平测出钩码的质量
③在作图时,下图中更加符合实际的图是 图.(填“甲”或“乙”)
(2)(10分)探究小车加速度与外力、质量关系的实验装置如下图甲所示。

①把带有滑轮的长木板左端垫高,在没有牵引的情况下让小车拖着纸带以一定的初速度沿木板运动,打点计时器在纸带打出一行计时点,如果计时点间距 ,就说明摩擦力和小车重力沿木板向下的分力平衡。
② 某同学在做实验中,使用 交变电流作电源,在打出的纸带上选择5个计数点A、B、C、D、E,相邻两个计数点之间还有4个点没有画出,他测量了
交变电流作电源,在打出的纸带上选择5个计数点A、B、C、D、E,相邻两个计数点之间还有4个点没有画出,他测量了 点到
点到 点、和
点、和 点到C点的距离,如下图乙所示。则纸带上C点的速度VC=
,重物的加速度为____
。(结果保留三位有效数字)
点到C点的距离,如下图乙所示。则纸带上C点的速度VC=
,重物的加速度为____
。(结果保留三位有效数字)
 图象如图3,则当地的实际重力加速度g=______m/s2.
图象如图3,则当地的实际重力加速度g=______m/s2.
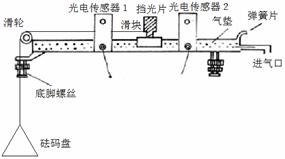
重庆一中高一年级一学习小组利用气垫导轨“探究在质量一定的条件下,物体的加速度与外力的关系”,实验装置如图甲所示。滑块上固定一遮光片,若光线被遮光片遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连。滑块在细线的牵引下向左加速运动,遮光条经过光电传感器2、1时,通过计算机可以得到如图乙所示的电压U随时间t变化的图像。滑块上挡光片的宽度为d,两光电传感器中心间的距离为L。
![]() 调节底脚螺丝。打开气源,向左轻推滑块(不挂重物),当 时,可认为滑块在导轨上做匀速运动。
调节底脚螺丝。打开气源,向左轻推滑块(不挂重物),当 时,可认为滑块在导轨上做匀速运动。
![]() 用细线将滑块与砝码盘相连,将滑块从右端释放,记录滑块经过光电传感器2、1的时间分别为
用细线将滑块与砝码盘相连,将滑块从右端释放,记录滑块经过光电传感器2、1的时间分别为![]() 和
和![]() ,因挡光片较窄,滑块经过光电传感器2时的瞬时速度可认为 ,则滑块运动的加速度为 。
,因挡光片较窄,滑块经过光电传感器2时的瞬时速度可认为 ,则滑块运动的加速度为 。
![]() 保证滑块的质量M一定,改变砝码盘中砝码的质量,测出各次的加速度,在下面的坐标中作出了a-F(F为砝码盘和砝码的总重力)图,下列与实际相符的应是: 。
保证滑块的质量M一定,改变砝码盘中砝码的质量,测出各次的加速度,在下面的坐标中作出了a-F(F为砝码盘和砝码的总重力)图,下列与实际相符的应是: 。
![]() 实验发现,在F较大时图线较明显地偏离了直线,请你提出改进措施以解决这一问题: 。
实验发现,在F较大时图线较明显地偏离了直线,请你提出改进措施以解决这一问题: 。
甲

乙

A B
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com