题目列表(包括答案和解析)
某实验小组设计了如图(a)所示的实验装置研究加速度和力的关系.
(1)在该实验中必须采用控制变量法,应保持________不变,用钩码所受的重力作为________,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力F的关系图象.在轨道水平和倾斜的两种情况下分别做了实验,得到了两条a-F图线,如图(b)所示.
(2)图线________(选填“①”或“②”)是在轨道右侧抬高成为斜面情况下得到的.
(3)随着钩码的数量增大到一定程度时图(b)中的图线明显偏离直线,造成此误差的主要原因是________.
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(4)小车和位移传感器发射部分的总质量m=________kg;滑块和轨道间的动摩擦因数μ=________(g取10 m/s2).


(10分)某实验小组设计了如图 a所示的实验装置,用钩码所受重力作为小车所受的拉力,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力 F的关系图像.他们在轨道水平和倾斜的两种情况下分别做实验,得到了两条 a-F图线,如图 b所示.
(1)图线 是在轨道右侧抬高成为斜面情况下得到的.(选填“①”或“②”)
(2)随着钩码的数量增大到一定程度时图 b中的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,为消除此误差可采取的最为简便且有效的措施是
A.调整轨道的倾角,在未挂钩码时使小车能在轨道上长时间缓慢运动(即小车与传感器发射部分的重力沿轨道方向的分力恰与其所受摩擦力平衡)
B.在增加钩码数量进行实验的同时在小车上增加砝码,使钩码的总质量始终远小于小车与传感器接收部分的总质量
C.在钩码与细绳之间放置一力传感器,直接得到小车运动的加速度 a和力传感器读数F的关系图像
D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验
(3)测得小车和位移传感器接收部分的总质量m= kg;滑块和轨道间的动摩擦因数μ= .
(10分)某实验小组设计了如图a所示的实验装置,用钩码所受重力作为小车所受的拉力,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力F的关系图像.他们在轨道水平和倾斜的两种情况下分别做实验,得到了两条a-F图线,如图b所示.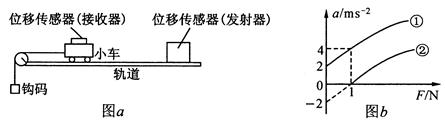
(1)图线 是在轨道右侧抬高成为斜面情况下得到的.(选填“①”或“②”)
(2)随着钩码的数量增大到一定程度时图b中的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,为消除此误差可采取的最为简便且有效的措施是
| A.调整轨道的倾角,在未挂钩码时使小车能在轨道上长时间缓慢运动(即小车与传感器发射部分的重力沿轨道方向的分力恰与其所受摩擦力平衡) |
| B.在增加钩码数量进行实验的同时在小车上增加砝码,使钩码的总质量始终远小于小车与传感器接收部分的总质量 |
| C.在钩码与细绳之间放置一力传感器,直接得到小车运动的加速度a和力传感器读数F的关系图像 |
| D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验 |
某实验小组设计了如图(a)所示的实验装置研究加速度和力的关系。
(1)在该实验中必须采用控制变量法,应保持______________不变,用钩码重力作为小车所受的拉力。
(2)如图(b)是某次实验打出的纸带的一部分,0、1、2、3、4、5、6为计数点,相邻两计数点间还有4个打点未画出,电源的频率为50Hz。从纸带上测出x1 =3.20cm,x2 = 4.56cm,x5 =8.42cm,x6 =9.70cm。则木块加速度大小 =__________m/s2(保留2位有效数字)。
=__________m/s2(保留2位有效数字)。
(3)通过改变钩码的数量,多次重复测量,可得小车运动的加速度a与所受拉力F的关系图象。在轨道水平和倾斜的两种情况下分别做了实验,得到了两条 图线,如图(c)所示。图线______ (选填“①”或“②”)是在轨道水平的情况下得到的。
图线,如图(c)所示。图线______ (选填“①”或“②”)是在轨道水平的情况下得到的。
(4)随着钩码的数量增大到一定程度,图(c)中的图线明显偏离直线,造成此误差的主要原因是___________。
| A.小车与轨道之间存在摩擦 | B.导轨保持了水平状态 |
| C.所挂钩码的总质量太大 | D.所用小车的质量太大 |
某实验小组设计了如图(a)所示的实验装置研究加速度和力的关系.

(1)在该实验中必须采用控制变量法,应保持________________不变,用钩码所受的重力作为________________,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力F的关系图像.在轨道水平和倾斜的两种情况下分别做了实验,得到了两条a-F图线,如图(b)所示.
(2)图线________(选填“①”或“②”)是在轨道右侧抬高成为斜面情况下得到的.
(3)随着钩码的数量增大到一定程度时图(b)中的图线明显偏离直线,造成此误差的主要原因是________.
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(4)小车和位移传感器接收部分的总质量m=________kg;滑块和轨道间的动摩擦因数μ=______(g取10 m/s2).
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com