题目列表(包括答案和解析)
 28、在研究“杠杆平衡条件的实验”中:
28、在研究“杠杆平衡条件的实验”中: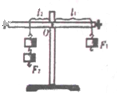 在研究杠杆平衡条件的实验中:
在研究杠杆平衡条件的实验中:| 次数 | F1/N | L1/cm | F2/N | L2/cm |
| 1 | 1 | 8 | 2 | 4 |
| 2 | 2 | 8 | 1 | 16 |
| 3 | 2 | 12 | 3 | 8 |

| 次数 | 动力(牛) | 动力臂(厘米) | 阻力(牛) | 阻力臂(厘米) |
| 1 | 0.98 | 2.0 | 0.49 | 4.0 |
| 2 | 1.96 | 3.0 | 2.94 | 2.0 |
在研究 “杠杆平衡条件的实验”中: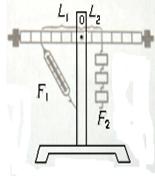
(1)首先将杠杆放在水平桌面上,发现杠杆左端下倾。那么他应将杠杆右端螺母向____(填“左”或“右”)调节一些,使杠杆在______位置平衡,其目的是 ;
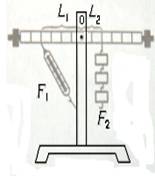
(2)小明用如图所示的装置验证杠杆的平衡条件,调节右边钩码的个数和悬挂位置,使杠杆水平平衡时,读出弹簧测力计的示数F1=1.1N,钩码对杠杆的拉力F2=1.47N,测得支点O到这两个作用点的距离L1=20cm,L2=10cm,他将所得数据直接代入杠杆平衡条件的公式中,发现F1· L1和F2· L2并不相等,从而认为杠杆的平衡条件不一定是F1·L1=F2·L2,小明失误的地方 。
在研究 “杠杆平衡条件的实验”中:
(1)首先将杠杆放在水平桌面上,发现杠杆左端下倾。那么他应将杠杆右端螺母向____(填“左”或“右”)调节一些,使杠杆在______位置平衡,其目的是 ;
(2)小明用如图所示的装置验证杠杆的平衡条件,调节右边钩码的个数和悬挂位置,使杠杆水平平衡时,读出弹簧测力计的示数F1=1.1N,钩码对杠杆的拉力F2=1.47N,测得支点O到这两个作用点的距离L1=20cm,L2=10cm,他将所得数据直接代入杠杆平衡条件的公式中,发现F1· L1和F2· L2并不相等,从而认为杠杆的平衡条件不一定是F1·L1=F2·L2,小明失误的地方 。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com