题目列表(包括答案和解析)
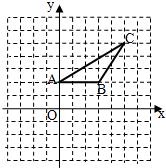 14、如图,在直角坐标平面内的△ABC中,点A的坐标为(0,2),点C的坐标为(5,5),如果要使△ABD与△ABC全等,且点D坐标在第四象限,那么点D的坐标是
14、如图,在直角坐标平面内的△ABC中,点A的坐标为(0,2),点C的坐标为(5,5),如果要使△ABD与△ABC全等,且点D坐标在第四象限,那么点D的坐标是A、(-1,
| ||
B、(-1,-
| ||
C、(-
| ||
D、(-
|
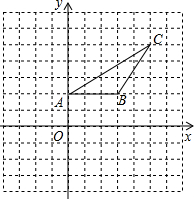 如图,在直角坐标平面内的△ABC中,点A的坐标为(0,2),点C的坐标为(5,5),要使以A、B、C、D为顶点的四边形是平行四边形,且点D坐标在第一象限,那么点D的坐标是
如图,在直角坐标平面内的△ABC中,点A的坐标为(0,2),点C的坐标为(5,5),要使以A、B、C、D为顶点的四边形是平行四边形,且点D坐标在第一象限,那么点D的坐标是在直角坐标平面内的机器人接受指令“[a,A]”(a≥0,0°<A<180°)后的行动结果为:在原地顺时针旋转A后,再向正前方沿直线行走口.若机器人的位置在原点,正前方为y轴的负半轴,则它完成一次指令[2,60°]后位置的坐标为( )
A、 B、
B、 C、
C、 D、
D、
如图,在直角坐标平面内的△ABC中,点A的坐标为(0,2),点C的坐标为(5,5),如果要使△ABD与△ABC全等,且点D坐标在第四象限,那么点D的坐标是 。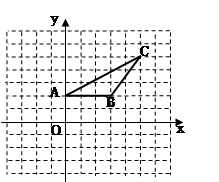
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com