题目列表(包括答案和解析)
不等号填空:若a<b<0 ,则![]()
![]() ;
;![]()
![]() ;
;![]()
![]() .
.
如图,抛物线y=ax2与反比例函数 的图象交于P点,若P点横坐标为1,则关于x的不等式
的图象交于P点,若P点横坐标为1,则关于x的不等式 >0的解是(
)
>0的解是(
)
A.x>1 B.x<-1 C.-1<x<0 D.0<x<1

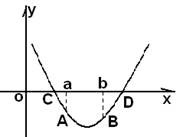
由示意图可见,抛物线y=x2 +px+q ①若有两点A(a,yl)、B(b,y2)(其中a<b)在x轴下方,则抛物线必与x轴有两个交点C(x1,O)、D(x2,O)(其中xl<x2),且满足xl<a<b<x2.当A(1,- 2.005),且xl、x2均为整数时,求二次函数的表达式,
根据指令[S, A](S≥0,0°<A<180°),机器人在平面上能完成下列动作:先原地逆时针旋转角度A,再朝其面对的方向沿直线行走距离S,现机器人在直角坐标系坐标原点,且面对x轴正方向。
(1)若给机器人下了一个指令[4,60],则机器人应移动到点_________;
(2)请你给机器人下一个指令_________,使其移到点(-5,5)。
.设有反比例函数y= ,(x1,y1)、(x2,y2)为其图象上的两点,若当x1<0<x2时,y1>y2,则k的取值范围是_______.
,(x1,y1)、(x2,y2)为其图象上的两点,若当x1<0<x2时,y1>y2,则k的取值范围是_______.
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com