题目列表(包括答案和解析)
6. (06苏州)估测天平游码的质量
(06苏州)估测天平游码的质量
①观察并读出天平横梁标尺上的最大刻度值为a(g);
②测得天平横梁标尺上从0到a刻度线之间的距离为b(mm).
③测得天平左、右两臂的长均为c(mm).
由以上数据,可估算出该游码的质量为_________(g).
知识点3:常见的省力杠杆、费力杠杆
5、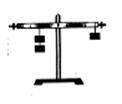 (05安徽)如右图所示是我们探究杠杆平衡条件的实验装置图.实验结束后,通过分析数据,有的同学指出:杠杆的平衡条件也可以是“动力× 支点到动力作用点的距离=阻力× 支点到阻力作用点的距离”.平时许多同学也经常用这种观点分析杠杆问题.事实上这种观点是片面的,因为支点到动(阻)力作用点的距离并不总是力臂.请你在本实验的基础上再补充一些器材,通过实验证明杠杆平衡条件在普遍情况下应该是“动力× 动力臂=阻力× 阻力臂”.
(05安徽)如右图所示是我们探究杠杆平衡条件的实验装置图.实验结束后,通过分析数据,有的同学指出:杠杆的平衡条件也可以是“动力× 支点到动力作用点的距离=阻力× 支点到阻力作用点的距离”.平时许多同学也经常用这种观点分析杠杆问题.事实上这种观点是片面的,因为支点到动(阻)力作用点的距离并不总是力臂.请你在本实验的基础上再补充一些器材,通过实验证明杠杆平衡条件在普遍情况下应该是“动力× 动力臂=阻力× 阻力臂”.
(1)你补充的器材有: 、 。
(2)写出操作步骤:
4、(05武汉)在“研究杠杆平衡条件”实验中
(1)实验前出现下图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆左端的螺母A向 调(填“左”或“右”)
图1
(2)实验过程中出现图乙所示情况,为了使杠杆在水平位置平衡,这时应将右边的钩码向 (填“左”或“右”)移动 格。
(3)图乙中杠杆水平平衡后,在杠杆左右两边钩码下同时加一个相同的钩码,这时杠杆将 。(填“保持水平平衡”、“顺时针转动”或“逆时针转动”)
(4)物理课本中有这样一句话“托盘天平是支点在中间的等臂杠杆,天平平衡时砝码的质量等于被测物体的质量”。实际上使用天平经常同时用到砝码和游码,此时被测物体的质量应 砝码的质量(填“大于”“小于”或“等于”)。
(5)如图19丙所示的案秤是个不等臂杠杆,请你根据杠杆的平衡条件,说明用几个不重的砝码就能平衡盘中重得多的货物的道理 。
3、(05贵阳)甲乙两个实验小组在探究“杠杆的平衡条件”时,分别得到下面两组数据和结论。他们在交流时,甲组发现了自己实验结论的错误和产生错误的原因。你认为甲组产生错误的原因有那些?
|
甲 组 |
|
乙 组 |
||||||
|
次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
动力 |
动力臂 |
阻力 |
阻力臂 |
|
1 |
4 |
5 |
5 |
4 |
7 |
4 |
2 |
14 |
|
2 |
3 |
4 |
4 |
3 |
6 |
4 |
8 |
3 |
|
3 |
|
|
|
|
4 |
5 |
2 |
10 |
|
结论 |
动力+ 动力臂=阻力+阻力臂 |
动力 动力臂=阻力阻力臂 动力臂=阻力阻力臂 |
甲组产生错误的原因: 。
2、(06无锡)在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在 位置平衡,这样做是为了便于测量 ;如发现杠杆左端偏高,则可将右端的平衡螺母向 调节,或将左端的平衡螺母向 调节。

上图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长
5cm,部分实验数据已记录在下表中。
|
实验次数 |
动力F1/N |
动力臂L1/cm |
阻力F2/N |
阻力臂L2/cm |
|
1 |
1.5 |
10 |
1 |
|
|
2 |
1 |
20 |
|
10 |
|
3 |
1 |
20 |
1.5 |
10 |
(1)请将表格中的实验数据补充完整。
(2)小明的第3次实验存在错误,其错误是 。
1、杠杆的平衡条件的内容是: 。公式是 。
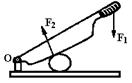
7、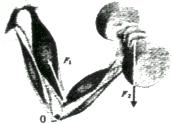 (06江苏淮安)下图是手握哑铃向上运动的模型图,肱二头肌收缩产生拉力F1,使前臂骨骼绕肘关节转动,前臂骨骼可以看成杠杆,肘关节是支点,哑铃对手的压力F2是阻力.试在图中作出F1、F2的力臂.
(06江苏淮安)下图是手握哑铃向上运动的模型图,肱二头肌收缩产生拉力F1,使前臂骨骼绕肘关节转动,前臂骨骼可以看成杠杆,肘关节是支点,哑铃对手的压力F2是阻力.试在图中作出F1、F2的力臂.
知识点2:探究杠杆的平衡条件
6、[05佛山]作出下图(右)的铡刀使用中的两个力臂,并标明L1和L2 。
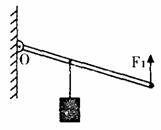
5、(06大连)如下图(左)是用杠杆提起重物的示意图。请画出拉力F1(方向竖直向上)的力臂L1,并画出挂重物的绳对杠杆的拉力F2的示意图及其力臂L2。
4、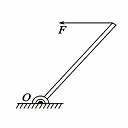 (06北京)如图3所示,O点为杠杆的支点,请画出力F的力臂,并用字母L表示
(06北京)如图3所示,O点为杠杆的支点,请画出力F的力臂,并用字母L表示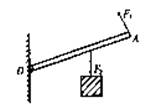
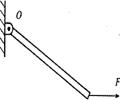
图1 图2 图3
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com