(2012?海淀区二模)随着城市汽车数量的激增,停车成为困扰市民的一大难题.图甲是某科技小组设计的升降横移式立体停车库截面示意图.该停车库主要由主体框架车位架和升降横移载车装置两部分构成.升降横移载车装置由升降传动机构和横移传动机构组成.升降传动机构由升降板、电动机Q、定滑轮K及动滑轮M构成,钢丝绳的两端分别固定在顶部A点和电动机牵引端的B点,其中的升降板和动滑轮M在电动机Q的控制下可以沿竖直通道上下运行,升降传动机构被束缚在光滑的限位槽内(图中未画出),保证升降板在升降过程中始终保持水平.置于每层的车位架上的横移传动机构由载车板、电动机P和钢轮构成.横移传动机构可以通过电动机P控制实现水平移动.现有一辆汽车甲开到载车板上后,升降传动机构以速度v
1匀速提升横移传动机构和汽车甲,此时绳子B端的拉力为F
1,车位架顶部对电动机Q的支持力为N
1,升降传动机构提升横移传动机构和汽车甲的机械效率为η
1;另一辆汽车乙开到载车板上后,升降传动机构以速度v
2匀速提升横移传动机构和汽车乙,此时绳子B端的拉力为F
2,车位架顶部对电动机Q的支持力为N
2,升降传动机构提升横移传动机构和汽车乙的机械效率为η
2.拉力F
1、F
2做的功随时间变化的图象分别如图21乙中①、②所示.已知电动机Q的质量m
Q=95kg,v
1=5cm/s,η
1=72%,N
1:N
2=24:29,不计绳重及滑轮的摩擦,g取10N/kg.求:
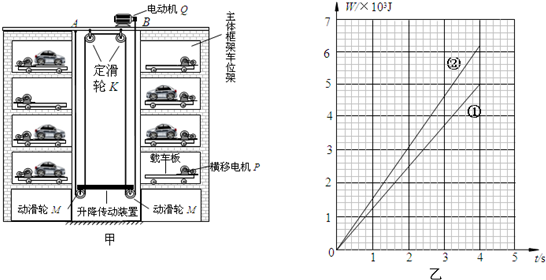
(1)F
1的大小;
(2)v
2的大小;
(3)η
2的大小.

 “天宫一号”是中国首个目标飞行器,如图,是由长征二号FT1运载火箭于2011年9月29日21时16分3秒在酒泉卫星发射中心发射时的情景,该航天器高10.4
“天宫一号”是中国首个目标飞行器,如图,是由长征二号FT1运载火箭于2011年9月29日21时16分3秒在酒泉卫星发射中心发射时的情景,该航天器高10.4