小强在探究“杠杆的平衡条件”时,如图1所示:

下面是他所设计的探究“杠杆平衡条件”的步骤:
①把杠杆的中点支在支架上;
②把钩码挂在杠杆两边,改变钩码的位置使杠杆平衡;
③记下两边钩码受到的重力,并用尺量出它们的力臂,
分别填入实验数据的表格内;
④改变力和力臂的数值,做三次实验;
⑤求出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值.
(1)该同学在
第①
第①
步漏掉了一个重要的步骤.这一步写完整应为
把杠杆的中点支在支架上,调节杠杆两端的平衡螺母,使杠杆水平平衡
把杠杆的中点支在支架上,调节杠杆两端的平衡螺母,使杠杆水平平衡
.
(2)下表是小强的实验记录,在这两组数据中,他发现实验有一组数据是错误的.经检查,结果是测量阻力臂时读错了,阻力臂的实际值应为
0.6
0.6
m.
| 实验序号 |
动力F1/N |
动力臂L1/m |
阻力F2/N |
阻力臂L2/m |
| 1 |
2 |
0.3 |
1 |
0.4 |
| 2 |
1 |
0.4 |
2 |
0.2 |
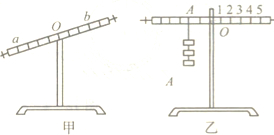
(3)另一个同学小红根据实验现象得出的杠杆平衡条件是:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.为了说明这一结论并不正确,请你在图2所示的杠杠B点上画出需要对杠杠施加的力的示意图和这个力的力臂.
(4)如图3所示,绳子OO′悬吊着质量忽略不计的杠杆,在杆的a点挂上重物G,在O右侧某点b处挂上钩码.重 物G的质量及a到O的距离不变,要使杆保持水平,b点挂的钩码个数(各个钩码质量相同)和b到O的距离的关系是图4中哪一幅图.
 在“探究杠杆平衡条件”的实验中:
在“探究杠杆平衡条件”的实验中: