题目列表(包括答案和解析)
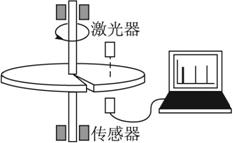
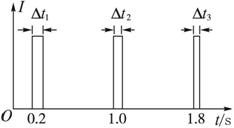
(12分)一水平放置的圆盘绕竖直固定轴转动,在圆盘上沿半径开有一条宽度为2mm的均匀狭缝。将激光器与传感器上下对准,使二者间连线与转轴平行,分别置于圆盘的上下两侧,且可以同步地沿圆盘半径方向匀速移动,激光器连续向下发射激光束.在圆盘转动过程中,当狭缝经过激光器与传感器之间时,传感器接收到一个激光信号,并将其输入计算机,经处理后画出相应图线。图(a)为该装置示意图,图(b)为所接收的光信号随时间变化的图线,横坐标表示时间,纵坐标表示接收到的激光信号强度,图中Δt1=1.0×10-3s,Δt2=0.8×10-3s。

(1)利用图(b)中的数据求1s时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度Δt3。
(14分)一水平放置的圆盘绕竖直固定轴转动,在圆盘上沿半径开有一条宽度为2mm的均匀狭缝。将激光器与传感器上下对准,使两者间连线与转轴平行,分别置于圆盘的上下两侧,且可以同步地沿圆盘半径方向匀速移动,传感器接收一个激光信号,并将其输入计算机,经处理后画出相应图线。图(a)为该装置的示意图,图(b)为所接收的光信号随时间变化的图像,横坐标表示时间,纵坐标表示接收到的激光信号强度,图中△t1=1.0×10-3s,△t2=0.8×10-3s。

(1)利用图(b)中的数据求1s时圆盘转动的角速度。
(2)说明激光器和传感器沿半径移动的方向。
(3)求图(b)中第三个激光信号的宽度△t3。
(a)
(b)
图
(1)利用图(b)中的数据求1 s时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度Δt3.

图5-1
(1)利用图(b)中的数据求1 s时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度Δt3.
之间时,传感器接收到一个激光信号,并将其输入计算机,经处理后画出相应图线.图6-3(a)为该装置示意图,图6-3(b)为所接收的光信号随时间变化的图线,横坐标表示时间,纵坐标表示接收到的激光信号强度,图中Δt1=1.0×10-3 s,Δt2=0.8×10-3 s.
(1)利用图(b)中的数据求1 s时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度Δt3.


图6-3
物理
1、C 2、BCD 3、A 4、AC 5、D 6、B 7、BD 8、D 9、ACD 10、D
11. (1)2.600 2.030 
12. (全对才得分)(1)BCF (2)BD (3) 65.7(65.2---66.0都给分) ABD
 13.
13. :设转速为n
:设转速为n
对上图有:水平方向 Nsinθ-fcosθ=m4π2nr……………① 2/
竖直方向上有Ncosθ+fsinθ=mg ……………② 2/
F=μN …………………………③ 1/
联立方程有

对下图有:水平方向 Nsinθ+fcosθ=m4π2nr ……………① 1/
竖直方向上有Ncosθ-fsinθ=mg ……………② 1/
F=μN …………………………③
联立方程有
综上可知: 3/
3/
14解:(1)在轨道I上,飞行器所受万有引力提供向心力,设地球质量为M,则有
 ………………………2/
………………………2/
同理在轨道II上  ………………………1/
………………………1/
由上式可得 ………………………1/
………………………1/
在轨道I上重力加速度为g′,则有 ………………………2/
………………………2/
可得  ………………………1/
………………………1/
(2)设喷出气体质量为△m,由动量守恒得: ……2/
……2/  ……………………… ………………………1/
……………………… ………………………1/
 17. (1)由图线读得,转盘的转动周期T=0.8s ………………………① 1分
17. (1)由图线读得,转盘的转动周期T=0.8s ………………………① 1分
角速度 ………………………②
2分
………………………②
2分
(2)激光器和探测器沿半径由中心向边缘移动(理由为:由于脉冲宽度在逐渐变窄,表明光信号能通过狭缝的时间逐渐减少,即圆盘上对应探测器所在位置的线速度逐渐增加,因此激光器和探测器沿半径由中心向边缘移动). 2分
(3)设狭缝宽度为d,探测器接收到第i个脉冲时距转轴的距离为r1,第i个脉冲的宽度为△ti,激光器和探测器沿半径的运动速度为v.
 ③ 1分
③ 1分
r3-r2=r2-r1=vT ④ 1分
r2-r1= ⑤
1分
⑤
1分
r3-r2= ⑥ 1分
⑥ 1分
由④、⑤、⑥式解得:
 7 2分
7 2分
18、若m1>m2时,碰撞后系统的总动量方向向左,
设它们相对静止时的共同速度为V/,据动量守恒定律, 有:m1V-m2V=(m1+m2)V’
所以V/=(m1-m2)V/(m1+m2) 2分
若相对静止时B正好在A的右端,则系统机械能损失应为μm2gL,
则据能量守恒: 2分
2分
解得:V= 1 分
1 分
若m1=m2时,碰撞后系统的总动量为零,最后都静止在水平面上, 1分
设静止时A在B的右端,则有: 2分
2分
解得:V= 带入
带入 2分
2分
若m1<m2时,则A和墙壁能发生多次碰撞,每次碰撞后总动量方向都向右,
设最后A静止在靠近墙壁处时,B静止在A的右端, 1分
同理有: 1分
解得:V=
2 分
故:若m1>m2,V必须小于或等于
若m1<m2,V必须小于或等于
若m1=m2 V必须等于
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com