小明利用杠杆做了两个小实验:
A:“探究杠杆的平衡条件”
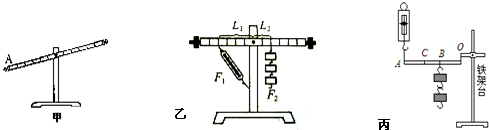
(1)当杆杠静止在图(甲)所示的位置时,杆杠处于
平衡
平衡
(“平衡”或“不平衡”)状态,此时应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了
便于测出力臂大小
便于测出力臂大小
;
(2)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是
使实验结论具有普遍性
使实验结论具有普遍性
.
(3)在图(乙)中使杠杆处于平衡状态时,测出的拉力大小与杠杆平衡条件不相符.其原因是:
从杠杆上直接读取不是拉力的力臂
从杠杆上直接读取不是拉力的力臂
.
B:“探究杠杆的机械效率”
如图丙所示装置,每个钩码的质量为m,O为支点.
(1)他将2只钩码悬挂在B点,在A点竖直向上匀速拉动弹簧测力计,拉力为F
1,测得A、B两点上升的高度分别为h
1、h
2,则此次杠杆的机械效率为η=
.(用物理量的符号表示)
(2)他将2只钩码悬挂在C点,在A点竖直向上匀速拉动弹簧测力计,使C点上升高度为h
2,则弹簧测力计的示数将
大于
大于
(大于/等于/小于)F
1,此次弹簧测力计做的功将
小于
小于
(大于/等于/小于)第一次做的功.
(3)他将3只钩码悬挂在C点,在A点竖直向上匀速拉动弹簧测力计,使C点上升高度仍为h
2,则第3次杠杆的机械效率与前两次相比
最大
最大
(最大/最小/三次相等).