题目列表(包括答案和解析)
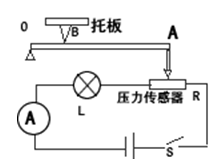
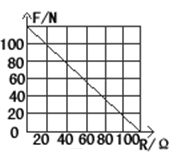
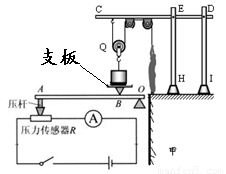
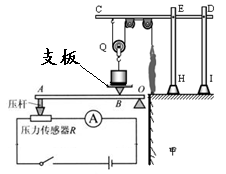
小明设计的压力传感器如图。它的主要构成部分:支板和压力杠杆ABO,压力传感器R(电阻值会随所受压力大小发生变化的可变电阻),显示压力大小的仪表A(实质是电流表)、滑轮组合(滑轮组合由动滑轮Q和安装在水平杆CD上的两个定滑轮组成)。图中水平杆CD与竖直杆EH、DI组合成支架固定在水平地面上。设支板和压力杠杆ABO、杠杆组件的质量、绳的质量,滑轮与轴的摩擦可以忽略不计。接通电源后,压力传感器两端的电压恒为4.8V,取g=10N/kg。其中AO∶BO=5∶1,压力传感器R的电阻与所受压力的关系如下表所示
| 压力F/N | 0 | 50 | 100 | 150 | 200 | 250 | 300 | … |
电阻R/ | 300 | 270 | 240 | 210 | 180 | 150 | 120 | … |
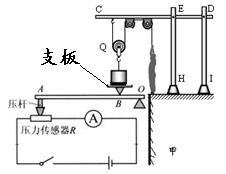
小明设计的压力传感器如图。它的主要构成部分:支板和压力杠杆ABO,压力传感器R(电阻值会随所受压力大小发生变化的可变电阻),显示压力大小的仪表A(实质是电流表)、滑轮组合(滑轮组合由动滑轮Q和安装在水平杆CD上的两个定滑轮组成)。图中水平杆CD与竖直杆EH、DI组合成支架固定在水平地面上。设支板和压力杠杆ABO、杠杆组件的质量、绳的质量,滑轮与轴的摩擦可以忽略不计。接通电源后,压力传感器两端的电压恒为4.8V,取g=10N/kg。其中AO∶BO=5∶1,压力传感器R的电阻与所受压力的关系如下表所示
|
压力F/N |
0 |
50 |
100 |
150 |
200 |
250 |
300 |
… |
|
电阻R/ |
300 |
270 |
240 |
210 |
180 |
150 |
120 |
… |
当支板上放重物G1=650N时,小明以拉力F1匀速拉动绳子,使物体压在支板上时,压力杠杆ABO在水平位置平衡,此时电流表的示数为20mA;当支板上放重物G2=1500N时,小明以拉力F2匀速拉动绳子,使物体压在支板上时,压力杠杆ABO仍在水平位置平衡,此时电流表的示数为32mA;且F1: F2=2:3
请回答:(1)当电流表的示数为25 mA且压力杠杆ABO在水平位置平衡时,支板处受到的压力为多大?(2)若人的体重为700N,当支板上放重物G1和重物G2两种情况下,人匀速拉绳时对地面的压强P1和P2之比为多少?
| 压力F/N | 0 | 50 | 100 | 150 | 200 | 250 | 300 | … |
电阻R/ | 300 | 270 | 240 | 210 | 180 | 150 | 120 | … |
一、知识要点
1.实验室常用的测量力的工具是 ,其原理是:在弹性限度内,弹簧所受拉力越大,它的 就越长。使用它时应注意:使用前,先调节指针指在 、观察它的 和 、使用时挂钩不要与刻度板 。
2.若物体在受力时会发生形变,不受力时又能自动恢复到原来的形状,物体的这种特性叫做 ;若物体受力时发生形变,力撤消后不能自动恢复到原来的形状,物体这种特性叫做 。弹力是物体由于发生 而产生的。
3.宇宙间任何两个物体,大到天体,小到灰尘之间,都存在 力,这就是万有引力。由于 的吸引而使物体受到的力叫做重力,重力常用字母 来表示,重力的施力物体为 ;物体受到的重力跟它的 成正比,公式为:G=mg,其中g= ,其含义为: ;重力的方向: ;重力的作用点叫 ,质量分布均匀,形状规则的物体的重心在其 。
4.两个互相接触的物体,当它们做 时,在接触面上会产生一种阻碍相对运动的力,这种力就叫做摩擦力;滑动摩擦力的大小与 及接触面的 有关; 越大,接触面越 ,滑动摩擦力就越大。摩擦力的方向与相对运动的方向 。
增大摩擦的办法: 、 。减小摩擦的办法: 、 、 、 。
6.一根硬棒,在 能绕着固定点转动,这根硬棒就叫做杠杆;力臂是从 到作用力 的距离。杠杆平衡条件表达式为: ;省力杠杆的![]()
![]() 、费力杠杆的
、费力杠杆的![]()
![]() 、等臂杠杆的
、等臂杠杆的 ![]()
![]() 。
。
7、定滑轮实际上是 杠杆,它不省力,但能改变 。动滑轮实际上是动力臂为阻力臂 倍的杠杆。它可以 ,但却不能 。滑轮组既能 又能改变 。滑轮组若由几段绳子承担总重量,则拉力的大小为总重力的 ,动力拉动绳子移动的距离为滑轮组拉动物体运动距离的
倍。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com