题目列表(包括答案和解析)
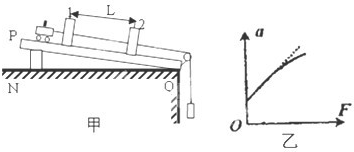
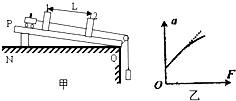 光电门传感器也是一种研究物体运动情况的计时仪器,现利用图甲所示装置设计一个“验证物体产生的加速度与合外力、质量关系”的实验,图中NO是水平桌面,PO是一端带有滑轮的长木板,1、2是固定在木板上的两个光电门.小车上固定着用于挡光的窄片,让小车从木板的顶端滑下,光电门连接数据采集器,并把数据采集器和计算机连接,打开软件.
光电门传感器也是一种研究物体运动情况的计时仪器,现利用图甲所示装置设计一个“验证物体产生的加速度与合外力、质量关系”的实验,图中NO是水平桌面,PO是一端带有滑轮的长木板,1、2是固定在木板上的两个光电门.小车上固定着用于挡光的窄片,让小车从木板的顶端滑下,光电门连接数据采集器,并把数据采集器和计算机连接,打开软件.(
| ||||||||
| 2L |
(
| ||||||||
| 2L |
 在科技活动中某同学利用自制的电子秤来称量物体的重力,如图所示,为电子秤的原理图.托盘和弹簧的质量均不计,滑动变阻器的滑动端与弹簧上端连接,当托盘中没有放物体时,电压表示数为零;当托盘中的物体的质量改变时,电压表示数发生改变,从而测出物体的质量.设变阻器的总电阻为R,总长度为l,电源电动势为E,内阻为0,弹簧劲度系数为k,弹簧产生的弹力与弹簧压缩量x成正比,即F=k?x.不计一切摩擦和其他阻力,电压表为理想表.
在科技活动中某同学利用自制的电子秤来称量物体的重力,如图所示,为电子秤的原理图.托盘和弹簧的质量均不计,滑动变阻器的滑动端与弹簧上端连接,当托盘中没有放物体时,电压表示数为零;当托盘中的物体的质量改变时,电压表示数发生改变,从而测出物体的质量.设变阻器的总电阻为R,总长度为l,电源电动势为E,内阻为0,弹簧劲度系数为k,弹簧产生的弹力与弹簧压缩量x成正比,即F=k?x.不计一切摩擦和其他阻力,电压表为理想表.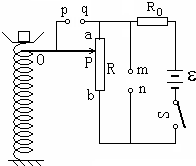
| d2 |
| 2L |
| 1 |
| t22 |
| 1 |
| t12 |
| d2 |
| 2L |
| 1 |
| t22 |
| 1 |
| t12 |
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com