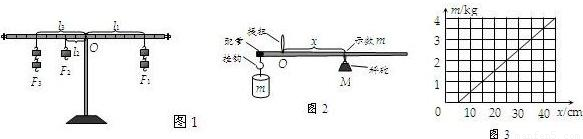
如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个.
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉.此时,应把杠杆两端的平衡螺母向
左
左
(选填“左”或“右”)调节,使杠杆在不挂钩码时,保持
杠杆在水平位置
杠杆在水平位置
并静止,达到平衡状态.这样做的好处是:便于在杠杆上直接测量
力臂
力臂
.
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡.于是小明便得出了杠杆的平衡条件为:动力×动力臂=阻力×阻力臂.他这样得出的结论是否合理?
不合理
不合理
;为什么?
只测一组数据,结论具有偶然性
只测一组数据,结论具有偶然性
.

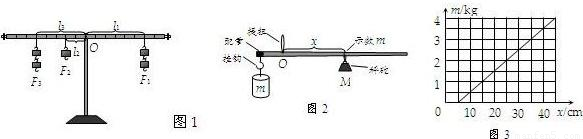
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:
受杠杆自身重力的影响
受杠杆自身重力的影响
.
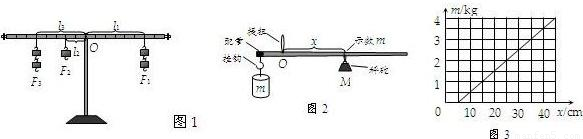
(4)小民和小华照图16的方法做了几次实验,分析得出杠杆的平衡条件为“动力×支点到动力作用点的距离”=“阻力×支点到阻力作用点的距离”.你认为他们的结论正确吗?你能设计实验证明自己的判断吗?