题目列表(包括答案和解析)
 角速度计可测量飞机、航天器、潜艇的转动角速度,其结构如图所示.当系统绕OO′轴转动时,元件A沿光滑杆发生位移并输出电压信号,成为飞机、卫星等的制导系统的信息源.已知A的质量为m,弹簧劲度系数为K,自然长度为L,电源电动势为E,内阻不计:滑动变阻器总长度为L,电阻分布均匀.当系统静止时P在B点;当系统在水平面内以角速度ω转动时,试写出输出电压U与ω的函数关系式.
角速度计可测量飞机、航天器、潜艇的转动角速度,其结构如图所示.当系统绕OO′轴转动时,元件A沿光滑杆发生位移并输出电压信号,成为飞机、卫星等的制导系统的信息源.已知A的质量为m,弹簧劲度系数为K,自然长度为L,电源电动势为E,内阻不计:滑动变阻器总长度为L,电阻分布均匀.当系统静止时P在B点;当系统在水平面内以角速度ω转动时,试写出输出电压U与ω的函数关系式. 角速度计可测量飞机、航天器、潜艇的转动角速度,其结构如图所示.当系统绕轴OO′转动时,元件A发生位移并输出相应的电压信号,成为飞机、卫星等的制导系统的信息源.已知A的质量为m,弹簧的劲度系数为k、自然长度为l,电源的电动势为E、内阻不计.滑动变阻器总长也为l,电阻分布均匀,系统静止时P在B点,当系统以角速度ω转动时,则( )
角速度计可测量飞机、航天器、潜艇的转动角速度,其结构如图所示.当系统绕轴OO′转动时,元件A发生位移并输出相应的电压信号,成为飞机、卫星等的制导系统的信息源.已知A的质量为m,弹簧的劲度系数为k、自然长度为l,电源的电动势为E、内阻不计.滑动变阻器总长也为l,电阻分布均匀,系统静止时P在B点,当系统以角速度ω转动时,则( ) 角速度计可测量航天器自转的角速度ω,其结构如图所示.当系统绕OO′转动时,元件A在光滑杆上发生滑动,并输出电压信号成为航天器的制导信号源.已知A质量为m,弹簧的劲度系数为k,原长为L0,电源电动势为E,内阻不计.滑动变阻器总长为L,电阻分布均匀,系统静止时滑动变阻器滑动头P在中点,与固定接点Q正对,当系统以角速度ω转动时,求:
角速度计可测量航天器自转的角速度ω,其结构如图所示.当系统绕OO′转动时,元件A在光滑杆上发生滑动,并输出电压信号成为航天器的制导信号源.已知A质量为m,弹簧的劲度系数为k,原长为L0,电源电动势为E,内阻不计.滑动变阻器总长为L,电阻分布均匀,系统静止时滑动变阻器滑动头P在中点,与固定接点Q正对,当系统以角速度ω转动时,求: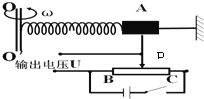 角速度计可测量飞机、航天器、潜艇的转动角速度,其结构如图所示.当系统绕轴OO′转动时,元件A发生移动并输出相应的电压信号,成为飞机、卫星等的制导系统的信息源.已知A的质量为m,弹簧的劲度系数为k、自然长度为l0,电源的电动势为E、内阻不计.滑动变阻器总长为l,电阻分布均匀,系统静止时P在B点,当系统以角速度ω转动时,求:
角速度计可测量飞机、航天器、潜艇的转动角速度,其结构如图所示.当系统绕轴OO′转动时,元件A发生移动并输出相应的电压信号,成为飞机、卫星等的制导系统的信息源.已知A的质量为m,弹簧的劲度系数为k、自然长度为l0,电源的电动势为E、内阻不计.滑动变阻器总长为l,电阻分布均匀,系统静止时P在B点,当系统以角速度ω转动时,求:
图5-18
(1)弹簧形变量x与ω的关系式;
(2)电压表的示数U与角速度ω的函数关系.
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com