题目列表(包括答案和解析)
 如图是一个上肢力量健身器示意图.配重A受到的重力为1600N,配重A上方连有一根弹簧测力计D,可以显示所受的拉力大小,但当它所受拉力在0~2500N范围内时,其形变可以忽略不计.B是动滑轮,C是定滑轮;杠杆EH可绕O点在竖直平面内转动,OE:OH=1:6.小阳受到的重力为700N,他通过细绳在H点施加竖直向下的拉力为T1时,杠杆在水平位置平衡,小阳对地面的压力为F1,配重A受到绳子的拉力为FA1,配重A上方的弹簧测力计D显示受到的拉力FD1为2.1×103N;小阳通过细绳在H点施加竖直向下的拉力为T2时,杠杆仍在水平位置平衡,小阳对地面的压力为F2,配重A受到绳子的拉力为FA2,配重A上方的弹簧测力计D显示受到的拉力FD2为2.4×103N.已知F1:F2=11:9.(杠杆EH、弹簧D和细绳的质量均忽略不计,不计绳和轴之间摩擦).
如图是一个上肢力量健身器示意图.配重A受到的重力为1600N,配重A上方连有一根弹簧测力计D,可以显示所受的拉力大小,但当它所受拉力在0~2500N范围内时,其形变可以忽略不计.B是动滑轮,C是定滑轮;杠杆EH可绕O点在竖直平面内转动,OE:OH=1:6.小阳受到的重力为700N,他通过细绳在H点施加竖直向下的拉力为T1时,杠杆在水平位置平衡,小阳对地面的压力为F1,配重A受到绳子的拉力为FA1,配重A上方的弹簧测力计D显示受到的拉力FD1为2.1×103N;小阳通过细绳在H点施加竖直向下的拉力为T2时,杠杆仍在水平位置平衡,小阳对地面的压力为F2,配重A受到绳子的拉力为FA2,配重A上方的弹簧测力计D显示受到的拉力FD2为2.4×103N.已知F1:F2=11:9.(杠杆EH、弹簧D和细绳的质量均忽略不计,不计绳和轴之间摩擦).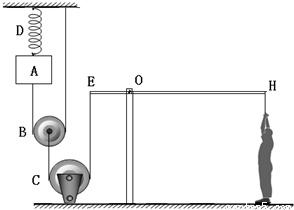
 (2009?昌平区二模)如图是一个上肢力量健身器示意图.配重A受到的重力为1600N,配重A上方连有一根弹簧测力计D,可以显示所受的拉力大小,但当它所受拉力在0~2500N范围内时,其形变可以忽略不计.B是动滑轮,C是定滑轮;杠杆EH可绕O点在竖直平面内转动,OE:OH=1:6.小阳受到的重力为700N,他通过细绳在H点施加竖直向下的拉力为T1时,杠杆在水平位置平衡,小阳对地面的压力为F1,配重A受到绳子的拉力为FA1,配重A上方的弹簧测力计D显示受到的拉力FD1为2.1×103N;小阳通过细绳在H点施加竖直向下的拉力为T2时,杠杆仍在水平位置平衡,小阳对地面的压力为F2,配重A受到绳子的拉力为FA2,配重A上方的弹簧测力计D显示受到的拉力FD2为2.4×103N.已知F1:F2=11:9.(杠杆EH、弹簧D和细绳的质量均忽略不计,不计绳和轴之间摩擦).
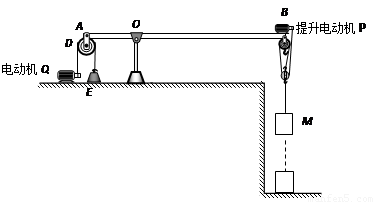
(2009?昌平区二模)如图是一个上肢力量健身器示意图.配重A受到的重力为1600N,配重A上方连有一根弹簧测力计D,可以显示所受的拉力大小,但当它所受拉力在0~2500N范围内时,其形变可以忽略不计.B是动滑轮,C是定滑轮;杠杆EH可绕O点在竖直平面内转动,OE:OH=1:6.小阳受到的重力为700N,他通过细绳在H点施加竖直向下的拉力为T1时,杠杆在水平位置平衡,小阳对地面的压力为F1,配重A受到绳子的拉力为FA1,配重A上方的弹簧测力计D显示受到的拉力FD1为2.1×103N;小阳通过细绳在H点施加竖直向下的拉力为T2时,杠杆仍在水平位置平衡,小阳对地面的压力为F2,配重A受到绳子的拉力为FA2,配重A上方的弹簧测力计D显示受到的拉力FD2为2.4×103N.已知F1:F2=11:9.(杠杆EH、弹簧D和细绳的质量均忽略不计,不计绳和轴之间摩擦).如图所示,某科技小组的同学制作了一个打捞物体的自动控制模型,E为配重,AOB是一个质地均匀的长方形横杆,其质量不计,OA∶OB=1∶3,在水平位置保持平衡。通过电动机Q可以控制杠杆B端抬起,从而将被打捞物体提起。已知滑轮D重为10N,B端定滑轮和提升电动机P的总质量是1kg,提升电动机P的功率为3W且保持不变,物体M的质量是1kg。只让提升电动机P工作,当物体M匀速上升时,提升电动机P对绳子的拉力为F1, B端滑轮组的机械效率为η1。若用质量为1.5kg物体N代替物体M,只让提升电动机P工作,当物体N匀速上升时,提升电动机P对绳子的拉力为F2, B端滑轮组的机械效率为η2,且η1∶η2=8∶9。不计绳的质量,不计滑轮与轴的摩擦,g取10N/kg,求:
(1)F1与F2的比值;
(2)只让提升电动机P工作,当物体M匀速上升时的速度υ;
(3)当物体N被提升到一定高度后,提升电动机P停止工作,启动电动机Q将杠杆B端匀速抬起的过程中,电动机Q对绳子的拉力F的大小。
如图所示,某科技小组的同学制作了一个打捞物体的自动控制模型,E为配重,AOB是一个质地均匀的长方形横杆,其质量不计,OA∶OB=1∶3,在水平位置保持平衡。通过电动机Q可以控制杠杆B端抬起,从而将被打捞物体提起。已知滑轮D重为10N,B端定滑轮和提升电动机P的总质量是1kg,提升电动机P的功率为3W且保持不变,物体M的质量是1kg。只让提升电动机P工作,当物体M匀速上升时,提升电动机P对绳子的拉力为F1, B端滑轮组的机械效率为η1。若用质量为1.5kg物体N代替物体M,只让提升电动机P工作,当物体N匀速上升时,提升电动机P对绳子的拉力为F2, B端滑轮组的机械效率为η2,且η1∶η2=8∶9。不计绳的质量,不计滑轮与轴的摩擦,g取10N/kg,求:
(1)F1 与F2的比值;
(2)只让提升电动机P工作,当物体M匀速上升时的速度υ;
(3)当物体N被提升到一定高度后,提升电动机P停止工作,启动电动机Q将杠杆B端匀速抬起的过程中,电动机Q对绳子的拉力F的大小。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com