ĢāÄæĮŠ±ķ(°üĄØ“š°øŗĶ½āĪö)
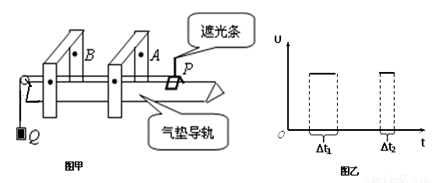
Ä³Ń§Ļ°Š”×éĄūÓĆĘųµęµ¼¹ģŃéÖ¤»śŠµÄÜŹŲŗć¶ØĀÉ£¬ŹµŃé×°ÖĆČēĶ¼¼×ĖłŹ¾”£ŌŚĘųµęµ¼¹ģÉĻĻąøōŅ»¶Ø¾ąĄėµÄĮ½“¦°²×°Į½øö¹āµē“«øŠĘ÷A”¢B£¬»¬æéPÉĻ¹Ģ¶ØŅ»ÕŚ¹āĢõ£¬Čō¹āĻß±»ÕŚ¹āĢõÕŚµ²£¬¹āµē“«øŠĘ÷»įŹä³öøßµēŃ¹£¬Į½¹āµē“«øŠĘ÷²É¼ÆŹż¾ŻŗóÓė¼ĘĖ滜ĻąĮ¬”£»¬æéŌŚĻøĻßµÄĒ£ŅżĻĀĻņ×ó¼ÓĖŁŌĖ¶Æ£¬ÕŚ¹āĢõ¾¹ż¹āµē“«øŠĘ÷A”¢BŹ±£¬Ķعż¼ĘĖ滜æÉŅŌµĆµ½ČēĶ¼ŅŅĖłŹ¾µÄµēŃ¹UĖꏱ¼ät±ä»ÆµÄĶ¼Ļó”£
¢ŁŹµŃéĒ°£¬½ÓĶØĘųŌ“£¬½«»¬æé£Ø²»¹Ņ¹³Āė£©ÖĆÓŚĘųµęµ¼¹ģÉĻ£¬ĒįĶĘ»¬æ飬µ±Ķ¼ŅŅÖŠµÄ¦¤t1 ”” ¦¤t2£ØŃ”Ģī”°£¾”±”¢”°=”±»ņ”°£¼”±£©Ź±£¬ĖµĆ÷Ęųµęµ¼¹ģŅŃ¾Ė®Ę½”£
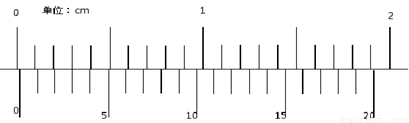
¢ŚÓĆĀŻŠż²āĪ¢Ę÷²āÕŚ¹āĢõæķ¶Čd£¬²āĮæ½į¹ūČēĶ¼±ūĖłŹ¾£¬Ōņd = ””””mm”£
¢Ū»¬æéPÓĆĻøĻßæē¹żĘųµęµ¼¹ģµÄ¶Ø»¬ĀÖÓėÖŹĮæĪŖmµÄ¹³ĀėQĻąĮ¬£¬½«»¬æéPÓÉĶ¼¼×ĖłŹ¾Ī»ÖĆŹĶ·Å£¬Ķعż¼ĘĖ滜µĆµ½µÄĶ¼ĻóČēĶ¼ŅŅĖłŹ¾£¬Čō¦¤t1”¢¦¤t2ŗĶdŅŃÖŖ£¬ŅŖŃéÖ¤»¬æéŗĶ¹³Āė×é³ÉµÄĻµĶ³»śŠµÄÜŹĒ·ńŹŲŗć£¬»¹Ó¦²ā³ö ”””””””””” ŗĶ ””””””””””£ØŠ“³öĪļĄķĮæµÄĆū³Ę¼°·ūŗÅ£©”£
¢ÜČōÉĻŹöĪļĄķĮæ¼äĀś×ć¹ŲĻµŹ½”” ””””””””””””””””””””””£¬Ōņ±ķĆ÷ŌŚÉĻŹö¹ż³ĢÖŠ£¬»¬æéŗĶ¹³Āė×é³ÉµÄĻµĶ³»śŠµÄÜŹŲŗć”£
 |
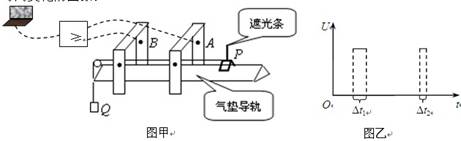
Ä³ŃŠ¾æŠŌѧĻ°Š”×éĄūÓĆĘųµęµ¼¹ģ½ųŠŠŃéÖ¤»śŠµÄÜŹŲŗć¶ØĀÉŹµŃ飬ŹµŃé×°ÖĆČēĶ¼¼×ĖłŹ¾”£½«Ęųµęµ¼¹ģĖ®Ę½·ÅÖĆ£¬ŌŚĘųµęµ¼¹ģÉĻĻąøōŅ»¶Ø¾ąĄėµÄĮ½µć“¦°²×°Į½øö¹āµē“«øŠĘ÷A”¢B£¬»¬æéPÉĻ¹Ģ¶ØÓŠÕŚ¹āĢõ£¬Čō¹āĻß±»ÕŚ¹āĢõÕŚµ²£¬¹āµē“«øŠĘ÷»įŹä³öøßµēĘ½£¬Į½¹āµē“«øŠĘ÷ŌŁĶعżŅ»øö»ņĆŵēĀ·Óė¼ĘĖ滜ĻąĮ¬”£»¬æéŌŚĻøĻßµÄĒ£ŅżĻĀĻņ×ó¼ÓĖŁŌĖ¶Æ£¬ÕŚ¹āĢõ¾¹ż¹āµē“«øŠĘ÷A”¢BŹ±£¬Ķعż¼ĘĖ滜æÉŅŌµĆµ½ČēĶ¼ŅŅĖłŹ¾µÄµēĘ½Ėꏱ¼ä±ä»ÆµÄĶ¼Ļó”£
¢ÅŹµŃéĒ°£¬½ÓĶØĘųŌ“£¬½«»¬æé£Ø²»¹Ņ¹³Āė£©ÖĆÓŚĘųµęµ¼¹ģÉĻ£¬ĒįĶĘ»¬æ飬ŌņĶ¼ŅŅÖŠµÄ¦¤t1”¢¦¤t2¼äĀś×ć ¹ŲĻµ£¬ŌņĖµĆ÷Ęųµęµ¼¹ģŅŃ¾Ė®Ę½”£
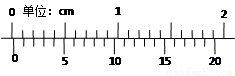
¢ĘÓĆÓĪ±źæس߲āÕŚ¹āĢõæķ¶Čd £¬²āĮæ½į¹ūČēĶ¼±ūĖłŹ¾£¬Ōņd = mm”£ 
Ķ¼±ū
(3)ÓĆĻøĻßĶعżĘųµęµ¼¹ģ×ó¶ĖµÄ¶Ø»¬ĀÖ½«»¬æéPÓėÖŹĮæĪŖmµÄ¹³ĀėQĻąĮ¬£¬½«»¬æéPÓÉČēĶ¼¼×ĖłŹ¾Ī»ÖĆŹĶ·Å£¬Ķعż¼ĘĖ滜µĆµ½µÄĶ¼ĻńČēĶ¼ŅŅĖłŹ¾£¬Čō¦¤t1”¢¦¤t2ŗĶdŅŃÖŖ£¬ŅŖŃéÖ¤»śŠµÄÜŹĒ·ńŹŲŗć,»¹Ó¦²ā³ö (Š“³öĪļĄķĮæµÄĆū³Ę¼°·ūŗÅ£©”£
(4)ČōÉĻŹöĪļĄķĮæ¼äĀś×ć¹ŲĻµŹ½ £¬Ōņ±ķĆ÷ŌŚ»¬æéŗĶķĄĀėµÄŌĖ¶Æ¹ż³ĢÖŠ£¬ĻµĶ³µÄ»śŠµÄÜŹŲŗć”£
Ä³ŃŠ¾æŠŌѧĻ°Š”×éĄūÓĆĘųµęµ¼¹ģ½ųŠŠŃéÖ¤»śŠµÄÜŹŲŗć¶ØĀÉŹµŃ飬ŹµŃé×°ÖĆČēĶ¼¼×ĖłŹ¾”£½«Ęųµęµ¼¹ģĖ®Ę½·ÅÖĆ£¬ŌŚĘųµęµ¼¹ģÉĻĻąøōŅ»¶Ø¾ąĄėµÄĮ½µć“¦°²×°Į½øö¹āµē“«øŠĘ÷A”¢B£¬»¬æéPÉĻ¹Ģ¶ØÓŠÕŚ¹āĢõ£¬Čō¹āĻß±»ÕŚ¹āĢõÕŚµ²£¬¹āµē“«øŠĘ÷±ć»įŹä³öøßµēŃ¹£¬²¢ÓɼĘĖ滜ĻŌŹ¾³öĄ“”£»¬æéŌŚĻøĻßµÄĒ£ŅżĻĀĻņ×ó¼ÓĖŁŌĖ¶Æ£¬ÕŚ¹āĢõ¾¹ż¹āµē“«øŠĘ÷A”¢BŹ±£¬Ķعż¼ĘĖ滜æÉŅŌµĆµ½ČēĶ¼ŅŅĖłŹ¾µÄµēŃ¹UĖꏱ¼ät±ä»ÆµÄĶ¼Ļó”£
£Ø1£©ŹµŃéĒ°£¬½ÓĶØĘųŌ“£¬½«»¬æé£Ø²»¹Ņ¹³Āė£©ÖĆÓŚĘųµęµ¼¹ģÉĻ£¬ĒįĶĘ»¬æ飬·ÅŹÖŹ¹Ęä×ŌÓÉ»¬¶Æ£¬ČōĶ¼ŅŅÖŠµÄ¦¤t1 ¦¤t2£ØŃ”Ģī”°>”±”¢”°=”±»ņ”°<”±£©£¬ŌņĖµĆ÷Ęųµęµ¼¹ģŅŃ¾Ė®Ę½”£
£Ø2£©ÓĆÓĪ±źæس߲āÕŚ¹āĢõæķ¶Čd £¬²āĮæ½į¹ūČēĶ¼±ūĖłŹ¾£¬Ōņd = mm”£
£Ø3£©ÓĆĻøĻßĶعżĘųµęµ¼¹ģ×ó¶ĖµÄ¶Ø»¬ĀÖ½«»¬æéPÓėÖŹĮæĪŖmµÄ¹³ĀėQĻąĮ¬£¬½«»¬æéPÓÉČēĶ¼¼×ĖłŹ¾Ī»ÖĆŹĶ·Å£¬Ķعż¼ĘĖ滜µĆµ½µÄĶ¼ĻńČēĶ¼ŅŅĖłŹ¾£¬Čō¦¤t1”¢¦¤t2ŗĶdŅŃÖŖ£¬ŅŖŃéÖ¤»śŠµÄÜŹĒ·ńŹŲŗć,»¹Ó¦²ā³ö
ŗĶ £ØŠ“³öĪļĄķĮæµÄĆū³Ę¼°·ūŗÅ£©”£
£Ø4£©ČōÉĻŹöĪļĄķĮæ¼äĀś×ć¹ŲĻµŹ½ £¬Ōņ±ķĆ÷ŌŚ»¬æéŗĶķĄĀėµÄŌĖ¶Æ¹ż³ĢÖŠ£¬ĻµĶ³µÄ»śŠµÄÜŹŲŗć”£
Ä³ŃŠ¾æŠŌѧĻ°Š”×éĄūÓĆĘųµęµ¼¹ģ½ųŠŠŃéÖ¤»śŠµÄÜŹŲŗć¶ØĀÉŹµŃ飬ŹµŃé×°ÖĆČēĶ¼¼×ĖłŹ¾”£½«Ęųµęµ¼¹ģĖ®Ę½·ÅÖĆ£¬ŌŚĘųµęµ¼¹ģÉĻĻąøōŅ»¶Ø¾ąĄėµÄĮ½µć“¦°²×°Į½øö¹āµē“«øŠĘ÷A”¢B£¬»¬æéPÉĻ¹Ģ¶ØÓŠÕŚ¹āĢõ£¬Čō¹āĻß±»ÕŚ¹āĢõÕŚµ²£¬¹āµē“«øŠĘ÷»įŹä³öøßµēĘ½£¬Į½¹āµē“«øŠĘ÷ŌŁĶعżŅ»øö»ņĆŵēĀ·Óė¼ĘĖ滜ĻąĮ¬”£»¬æéŌŚĻøĻßµÄĒ£ŅżĻĀĻņ×ó¼ÓĖŁŌĖ¶Æ£¬ÕŚ¹āĢõ¾¹ż¹āµē“«øŠĘ÷A”¢BŹ±£¬Ķعż¼ĘĖ滜æÉŅŌµĆµ½ČēĶ¼ŅŅĖłŹ¾µÄµēĘ½Ėꏱ¼ä±ä»ÆµÄĶ¼Ļó”£
¢ÅŹµŃéĒ°£¬½ÓĶØĘųŌ“£¬½«»¬æé£Ø²»¹Ņ¹³Āė£©ÖĆÓŚĘųµęµ¼¹ģÉĻ£¬ĒįĶĘ»¬æ飬ŌņĶ¼ŅŅÖŠµÄ¦¤t1”¢¦¤t2¼äĀś×ć ¹ŲĻµ£¬ŌņĖµĆ÷Ęųµęµ¼¹ģŅŃ¾Ė®Ę½”£
¢ĘÓĆÓĪ±źæس߲āÕŚ¹āĢõæķ¶Čd £¬²āĮæ½į¹ūČēĶ¼±ūĖłŹ¾£¬Ōņd = mm”£
Ķ¼±ū
(3)ÓĆĻøĻßĶعżĘųµęµ¼¹ģ×ó¶ĖµÄ¶Ø»¬ĀÖ½«»¬æéPÓėÖŹĮæĪŖmµÄ¹³ĀėQĻąĮ¬£¬½«»¬æéPÓÉČēĶ¼¼×ĖłŹ¾Ī»ÖĆŹĶ·Å£¬Ķعż¼ĘĖ滜µĆµ½µÄĶ¼ĻńČēĶ¼ŅŅĖłŹ¾£¬Čō¦¤t1”¢¦¤t2ŗĶdŅŃÖŖ£¬ŅŖŃéÖ¤»śŠµÄÜŹĒ·ńŹŲŗć,»¹Ó¦²ā³ö (Š“³öĪļĄķĮæµÄĆū³Ę¼°·ūŗÅ£©”£
(4)ČōÉĻŹöĪļĄķĮæ¼äĀś×ć¹ŲĻµŹ½ £¬Ōņ±ķĆ÷ŌŚ»¬æéŗĶķĄĀėµÄŌĖ¶Æ¹ż³ĢÖŠ£¬ĻµĶ³µÄ»śŠµÄÜŹŲŗć”£
Ä³ŃŠ¾æŠŌѧĻ°Š”×éĄūÓĆĘųµęµ¼¹ģ½ųŠŠŃéÖ¤»śŠµÄÜŹŲŗć¶ØĀÉŹµŃ飬ŹµŃé×°ÖĆČēĶ¼¼×ĖłŹ¾”£½«Ęųµęµ¼¹ģĖ®Ę½·ÅÖĆ£¬ŌŚĘųµęµ¼¹ģÉĻĻąøōŅ»¶Ø¾ąĄėµÄĮ½µć“¦°²×°Į½øö¹āµē“«øŠĘ÷A”¢B£¬»¬æéPÉĻ¹Ģ¶ØÓŠÕŚ¹āĢõ£¬Čō¹āĻß±»ÕŚ¹āĢõÕŚµ²£¬¹āµē“«øŠĘ÷±ć»įŹä³öøßµēŃ¹£¬²¢ÓɼĘĖ滜ĻŌŹ¾³öĄ“”£»¬æéŌŚĻøĻßµÄĒ£ŅżĻĀĻņ×ó¼ÓĖŁŌĖ¶Æ£¬ÕŚ¹āĢõ¾¹ż¹āµē“«øŠĘ÷A”¢BŹ±£¬Ķعż¼ĘĖ滜æÉŅŌµĆµ½ČēĶ¼ŅŅĖłŹ¾µÄµēŃ¹UĖꏱ¼ät±ä»ÆµÄĶ¼Ļó”£
£Ø1£©ŹµŃéĒ°£¬½ÓĶØĘųŌ“£¬½«»¬æé£Ø²»¹Ņ¹³Āė£©ÖĆÓŚĘųµęµ¼¹ģÉĻ£¬ĒįĶĘ»¬æ飬·ÅŹÖŹ¹Ęä×ŌÓÉ»¬¶Æ£¬ČōĶ¼ŅŅÖŠµÄ¦¤t1 ¦¤t2£ØŃ”Ģī”°>”±”¢”°=”±»ņ”°<”±£©£¬ŌņĖµĆ÷Ęųµęµ¼¹ģŅŃ¾Ė®Ę½”£
£Ø2£©ÓĆÓĪ±źæس߲āÕŚ¹āĢõæķ¶Čd £¬²āĮæ½į¹ūČēĶ¼±ūĖłŹ¾£¬Ōņd = mm”£ 
£Ø3£©ÓĆĻøĻßĶعżĘųµęµ¼¹ģ×ó¶ĖµÄ¶Ø»¬ĀÖ½«»¬æéPÓėÖŹĮæĪŖmµÄ¹³ĀėQĻąĮ¬£¬½«»¬æéPÓÉČēĶ¼¼×ĖłŹ¾Ī»ÖĆŹĶ·Å£¬Ķعż¼ĘĖ滜µĆµ½µÄĶ¼ĻńČēĶ¼ŅŅĖłŹ¾£¬Čō¦¤t1”¢¦¤t2ŗĶdŅŃÖŖ£¬ŅŖŃéÖ¤»śŠµÄÜŹĒ·ńŹŲŗć,»¹Ó¦²ā³ö
ŗĶ £ØŠ“³öĪļĄķĮæµÄĆū³Ę¼°·ūŗÅ£©”£
£Ø4£©ČōÉĻŹöĪļĄķĮæ¼äĀś×ć¹ŲĻµŹ½ £¬Ōņ±ķĆ÷ŌŚ»¬æéŗĶķĄĀėµÄŌĖ¶Æ¹ż³ĢÖŠ£¬ĻµĶ³µÄ»śŠµÄÜŹŲŗć”£
¹ś¼ŹŃ§Š£ÓÅŃ” - Į·Ļ°²įĮŠ±ķ - ŹŌĢāĮŠ±ķ
ŗž±±Ź”»„ĮŖĶųĪ„·ØŗĶ²»Į¼ŠÅĻ¢¾Ł±ØĘ½ĢØ | ĶųÉĻÓŠŗ¦ŠÅĻ¢¾Ł±Ø×ØĒų | µēŠÅÕ©Ę¾Ł±Ø×ØĒų | É꥜Ź·ŠéĪŽÖ÷ŅåÓŠŗ¦ŠÅĻ¢¾Ł±Ø×ØĒų | ÉęĘóĒÖČؾŁ±Ø×ØĒų
Ī„·ØŗĶ²»Į¼ŠÅĻ¢¾Ł±Øµē»°£ŗ027-86699610 ¾Ł±ØÓŹĻä£ŗ58377363@163.com