题目列表(包括答案和解析)
| d |
| t1 |
| d |
| t1 |
(
| ||||
2L
|
(
| ||||
2L
|
| s2+s3 |
| 2T |
| s2+s3 |
| 2T |
| (S3+S4)-(S1+S2 ) |
| 4T2 |
| (S3+S4)-(S1+S2 ) |
| 4T2 |
| (S3+S4)-(S1+S2 ) |
| 4T2 |
| (S3+S4)-(S1+S2 ) |
| 4T2 |
 利用下列器材设计实验研究三力平衡的规律:
利用下列器材设计实验研究三力平衡的规律:
| ||||
| 2L |
| ||||
| 2L |
| 次数 | F(N) | vB2-vA2(m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
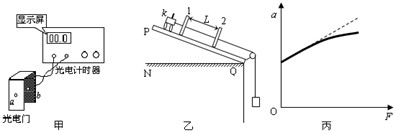
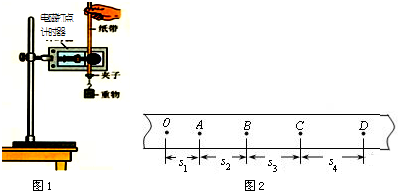
(9分)现要用如图所示的装置探究“加速度与物体受力的关系”。小车所受拉力和及其速度可分别由拉力传感器和速度传感器记录下来。速度传感器安装在距离L= 48.0cm的长木板的A、B两点。

(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车在没有拉力作用时能做 ___________ 运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作。
(2)下表中记录了实验测得的几组数据, 是两个速度传感器记录速率的平方差,则加速度的表达式a = ____ 。表中的第3次实验数据应该为a=
____ m/s2(结果保留三位有效数字)。
是两个速度传感器记录速率的平方差,则加速度的表达式a = ____ 。表中的第3次实验数据应该为a=
____ m/s2(结果保留三位有效数字)。
|
次数 |
F(N) |
|
a(m/s2) |
|
1 |
0.60 |
0.77 |
0.80 |
|
2 |
1.04 |
1.61 |
1.68 |
|
3 |
1.42 |
2.34 |
|
|
4 |
2.62 |
4.65 |
4.84 |
|
5 |
3.00 |
5.49 |
5.72 |
(3)如图所示的坐标纸上已经绘出了理论上的a-F图象。请根据表中数据,在坐标纸上作出由实验测得的a-F图线。

(4)对比实验结果与理论计算得到的两个关系图线,分析造成上述偏差的主要原因是 。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com