题目列表(包括答案和解析)
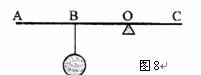
如图8所示,O点为轻质杠杆AC的支点,AB=BO=OC,B处挂一重为6牛的小球。若要使杠杆在水平位置平衡,则在C点施加的力应至少为 (16) 牛。若用最小的力使杠杆在水平位置平衡,则该力的大小为 (17) 牛,方向竖直 (18) 。
| 次数 | F1/N | l1/cm | F2/N | l2/cm |
| 1 | 1 | 8 | 2 | 4 |
| 2 | 2 | 8 | 1 | 16 |
| 3 | 2 | 12 | 3 | 8 |
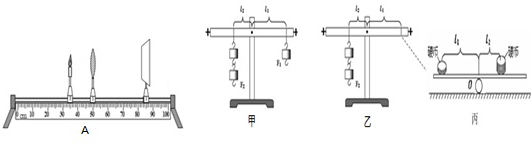
如图13示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点。
①实验前,应先调节杠杆在水平位置平衡。这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 。调节时,如发现杠杆左端偏高,应如何操作: 。
②某实验小组记录两组数据如下:
实验序号 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm |
1 | 2 | 20 | 1 | 10 |
2 | 1 | 8 | 2 | 4 |
根据分析,这组数据中,实验序号为 (选填:“1”或“2”)的一组肯定有错误。检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:大或小)。
③如图14所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,![]() 仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是 。
仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是 。
④某次实验中,若采取如图15所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 ![]() (选填字母)。
(选填字母)。
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
⑤如图16所示,某实验小组选用长1.6m、可绕O点在竖直平面内自由转动且粗细均匀的一根金属杆,将一个“拉力——距离传感器”竖直装置在杆上,并使杠杆在水平位置始终保持平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图17所示。由图可知金属杆重 N。


如图13示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点。
 ①实验前,应先调节杠杆在 ▲ 位置平衡。这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 ▲ 。调节时,如发现杠杆左端偏高,应如
①实验前,应先调节杠杆在 ▲ 位置平衡。这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 ▲ 。调节时,如发现杠杆左端偏高,应如![]() 何操作: ▲ 。
何操作: ▲ 。
②某实验小组记录两组数据如下:
| 实验序号 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
根据分析,这组数据中,实验序号为 ▲ (选填:“1”或“2”)的一组肯定有错误。检查发现是测量动力臂时读错了,动力臂的实际值比记录值 ▲ (选填:大或小)。
③如图14所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 ▲ (选填:变大、变小或保持不变),其原因是 ▲ 。(2分)
④某次实验中,若采取如图15所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 ▲ (选填字母)。
A.一个人无法独立操作 B.需要使用太多的钩码![]()
C.力臂与杠杆不重合 D.力和力臂数目过多
⑤如图16所示,某实验小组选用长1.6m、可绕O点在竖直平面内自由转动且粗细均匀的一根金属杆,将一个“拉力——距离传感器”竖直装置在杆上,并使杠杆在水平位置始终保持平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图17所示。由图可知金属杆重 ▲ N。

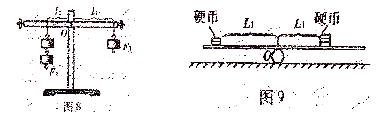
在研究杠杆平衡条件的实验中:
(1)小名调节杠杆在水平位置平衡后,按图8所示,通过加挂钩分别改变F![]() 、F
、F![]() ,仍使杠杆水平位置平衡,并用刻度尺在杠杆上测出对应的l
,仍使杠杆水平位置平衡,并用刻度尺在杠杆上测出对应的l![]() 和l
和l![]() ,记录的实验数据如下表:
,记录的实验数据如下表:
| 次数 | F | l | F | l |
| 1 | 1 | 8 | 2 | 4 |
| 2 | 2 | 8 | 1 | 16 |
| 3 | 2 | 12 | 3 | 8 |
小名通过观察以上实验装置,并分析数据得出杠杆平衡的条件是:“动力乘以动力作用点到支点的距离=阻力乘以阻力作用点到支点的距离”。小华认为小名的结论不正确,小华为了验证自己的观点,只将图8中的F![]() 改用弹簧测力计来拉,实验中改变拉力的______,仍使杠杆在水平位置平衡时,比较拉力的_______,即可证明小华的观点是否正确。
改用弹簧测力计来拉,实验中改变拉力的______,仍使杠杆在水平位置平衡时,比较拉力的_______,即可证明小华的观点是否正确。
(2)某同学利用身边的塑料直尺和硬币若干来验证杠杆平衡的条件,如图9所示,当杠杆在水平位置平衡时,他测出从支点O到硬币边缘的距离作为力臂L![]() 和L
和L![]() 的大小,他测力臂的方法是______的(选填“正确”或“错误”)。如果将两边的硬币以相同速度同时匀速向支点移动的过程中,则杠杆______(选填“仍平衡”、“向左倾斜”、“向右倾斜”)。
的大小,他测力臂的方法是______的(选填“正确”或“错误”)。如果将两边的硬币以相同速度同时匀速向支点移动的过程中,则杠杆______(选填“仍平衡”、“向左倾斜”、“向右倾斜”)。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com