方法简介
由于物质世界存在某些对称性,使得物理学理论也具有相应的对称性,从而使对称现象普遍存在于各种物理现象和物理规律中. 应用这种对称性它不仅能帮助我们认识和探索物质世界的某些基本规律,而且也能帮助我们去求解某些具体的物理问题,这种思维方法在物理学中称为对称法. 利用对称法分析解决物理问题,可以避免复杂的数学演算和推导,直接抓住问题的实质,出奇制胜,快速简便地求解问题.
 赛题精析
赛题精析
例1:沿水平方向向一堵竖直光滑的墙壁抛出一个弹性小球A,
抛出点离水平地面的高度为h,距离墙壁的水平距离为s, 小球与
墙壁发生弹性碰撞后,落在水平地面上,落地点距墙壁的水平距离
为2s,如图7-1所示. 求小球抛出时的初速度.
解析:因小球与墙壁发生弹性碰撞, 故与墙壁碰撞前后入射速
度与反射速度具有对称性, 碰撞后小球的运动轨迹与无墙壁阻挡时
小球继续前进的轨迹相对称,如图7-1-甲所示,所以小球的运动可
以转换为平抛运动处理, 效果上相当于小球从A′点水平抛出所做
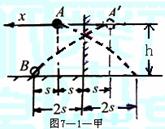 的运动.
的运动.
根据平抛运动的规律:
因为抛出点到落地点的距离为3s,抛出点的高度为h
代入后可解得:
 例2:如图7-2所示,在水平面上,有两个竖直光滑墙壁A和
例2:如图7-2所示,在水平面上,有两个竖直光滑墙壁A和
B,间距为d,
一个小球以初速度 从两墙正中间的O点斜向上抛
从两墙正中间的O点斜向上抛
出, 与A和B各发生一次碰撞后正好落回抛出点O, 求小球的抛
射角 .
.
解析:小球的运动是斜上抛和斜下抛等三段运动组成, 若按顺
序求解则相当复杂,如果视墙为一平面镜, 将球与墙的弹性碰撞等
效为对平面镜的物、像移动,可利用物像对称的规律及斜抛规律求解.
物体跟墙A碰撞前后的运动相当于从O′点开始的斜上抛运动,与B墙碰后落于O点相当于落到O″点,其中O、O′关于A墙对称,O、O″对于B墙对称,如图7-2-甲所示,于是有
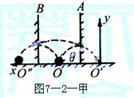
代入可解得
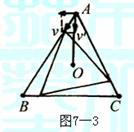
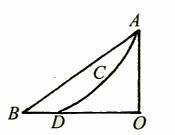
例3:A、B、C三只猎犬站立的位置构成一个边长为a的正三角形,每只猎犬追捕猎物的速度均为 ,A犬想追捕B犬,B犬想追捕C犬,C犬想追捕A犬,为追捕到猎物,猎犬不断调整方向,速度方向始终“盯”住对方,它们同时起动,经多长时间可捕捉到猎物?
,A犬想追捕B犬,B犬想追捕C犬,C犬想追捕A犬,为追捕到猎物,猎犬不断调整方向,速度方向始终“盯”住对方,它们同时起动,经多长时间可捕捉到猎物?
 解析:以地面为参考系,三只猎犬运动轨迹都是一条复杂
解析:以地面为参考系,三只猎犬运动轨迹都是一条复杂
的曲线,但根据对称性,三只猎犬最后相交于三角形的中心点,
在追捕过程中,三只猎犬的位置构成三角形的形状不变,以绕
点旋转的参考系来描述,可认为三角形不转动,而是三个顶点向
中心靠近,所以只要求出顶点到中心运动的时间即可.
由题意作图7-3, 设顶点到中心的距离为s,则由已知条
件得

由运动合成与分解的知识可知,在旋转的参考系中顶点向中心运动的速度为
 由此可知三角形收缩到中心的时间为
由此可知三角形收缩到中心的时间为 
此题也可以用递推法求解,读者可自己试解.
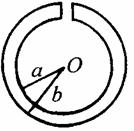
例4:如图7-4所示,两个同心圆代表一个圆形槽,
质量为m,内外半径几乎同为R. 槽内A、B两处分别放
有一个质量也为m的小球,AB间的距离为槽的直径. 不
计一切摩擦. 现将系统置于光滑水平面上,开始时槽静止,
两小球具有垂直于AB方向的速度,试求两小球第一次
相距R时,槽中心的速度.
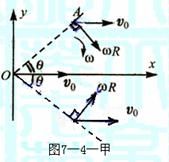 解析:在水平面参考系中建立水平方向的x轴和y轴.
解析:在水平面参考系中建立水平方向的x轴和y轴.
由系统的对称性可知中心或者说槽整体将仅在x轴方向上
运动。设槽中心沿x轴正方向运动的速度变为,两小球
相对槽心做角速度大小为 的圆周运动,A球处于如图
的圆周运动,A球处于如图
7-4-甲所示的位置时,相对水平面的两个分速度为
 ①
①
 ②
②
B球的运动与A球的运动是对称的.
因系统在x轴方向上动量守恒、机械能也守恒,因此
|
将①、②式代入③、④式得:

由此解得 
当两球间距离为R时, ,代入可解得槽中心运动的速度为
,代入可解得槽中心运动的速度为

例5:用一轻质弹簧把两块质量各为M和m的木板连接起来,
放在水平上,如图7-5所示,问必须在上面木板上施加多大的压
力F,才能使撤去此力后,上板跳起来恰好使下板离地?
解析:此题可用能量守恒的观点求解,但过程较繁,而用弹簧
形变的“对称性”求解就显得简洁明了.
若用拉力F作用在m上,欲使M离地,拉力F至少应为
 F=(M+m)g
F=(M+m)g
根据弹簧的拉伸和压缩过程具有的对称性,故要产生上述效果,
作用在m上的向下的压力应为F=(M+m)g
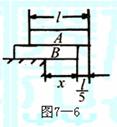
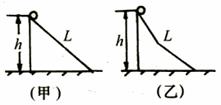
例6:如图7-6所示,长为l的两块相同的均匀长方形砖块A
和B叠放在一起,A砖相对于B砖伸出l/5,B砖放在水平桌面上,砖
的端面与桌面平行. 为保持两砖不翻倒,B砖伸出桌面的最大长度是
 多少?
多少?
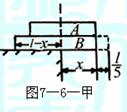
解析:此题可用力矩平衡求解,但用对称法求解,会直观简洁.
把A砖右端伸出B端的l/5截去,补在B砖的右端,则变成图
7-6-甲所示的对称形状. 伸出最多时对称轴应恰好通过桌边.
所以:
解得B砖右端伸出桌面的最大长度为 .
.
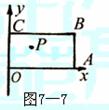
例7:如图7-7所示,OABC是一张水平放置的桌球台面.取OA为x轴,OC为y轴,P是红球,坐标为(x,y),Q是白球,坐标为( ,
, )(图中未画出Q球在台面上的位置).已知OA=BC=25dm,AB=OC=12dm.
)(图中未画出Q球在台面上的位置).已知OA=BC=25dm,AB=OC=12dm.
 若P球的坐标为:
若P球的坐标为: 处,问Q球的位置在什么
处,问Q球的位置在什么
范围内时,可使击出的Q球顺次与AB、BC、CO和OA四壁碰撞反
弹,最后击中P球?
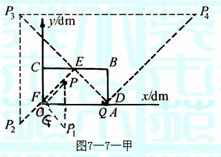
解析:由于弹性碰撞反弹服从的规律与光线的反射定律相同,所
以作P点对OA壁的镜像P1,P1对CO壁的镜像P2,P2对BC壁的镜像P3和P3对AB壁的镜像P4,则只需瞄准P4点击出Q球,Q球在AB壁上D点反弹后射向P3,又在BC壁上E点反弹后射向P2,依次类推,最后再经F,G二点的反弹击中P点,如图7-7-甲所示.
 但是,若反弹点E离B点太近,
Q球从E点反
但是,若反弹点E离B点太近,
Q球从E点反
弹后EP2线与CO的交点,可能不在CO壁的范围内
而在CO的延长线上, 这时Q球就无法击中CO壁
(而击到OA壁上),不符合题目要求,所以,Q球能
够最后按题目要求击中P球的条件是:反弹点D、E、
F、和G一定要在相应的台壁范围之内.
已知P点的坐标为(10,8),由此可知,各个镜
像点的坐标分别为
P1(10,-8),P2(-10,-8),P3(-10,32),P4(60,32)
设Q点的坐标为 ;直线QP4的方程为
;直线QP4的方程为
 ①
①
D点在此直线上, ,由上式得:
,由上式得:
 ②
②
直线DP3的方程为
 ③
③
E点在此直线上,YE=12,由 此式及②式得
 ④
④
直线EP2的方程为 
F点在此直线上,
最后,直线FP1的方程为  ⑤
⑤
G点在此直线上,YG=0,所以  ⑥
⑥
反弹点位于相应台壁上的条件为 ⑦
⑦
将③、④、⑤和⑥式代入⑦,除肯定满足无需讨论的不等式外,Q球按题目要求击中P球的条件成为
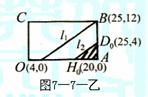 上面共两个条件,作直线
上面共两个条件,作直线 及
及
如图7-7-乙所示,若Q球位于 下方的三角形D0AH0
下方的三角形D0AH0
内,即可同时满足⑧、⑨两式的条件,瞄准P4击出,可
 按题目要求次序反弹后击中P球,三角形D0AH0三个顶
按题目要求次序反弹后击中P球,三角形D0AH0三个顶
点的坐标如图7-7-乙所示.
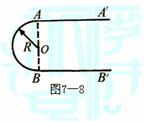
例8:一无限长均匀带电细线弯成如图7-8所示
的平面图形,其中AB是半径为R的半圆孤,AA′平行于
BB′,试求圆心O处的电场强度.
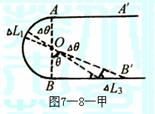 解析:如图7-8-甲所示,左上1/4圆弧内的线元△L1
解析:如图7-8-甲所示,左上1/4圆弧内的线元△L1
与右下直线上的线元△L3具有角元△对称关系. △L1电荷
与△L3电荷在O点的场强△E1与△E3方向相反,若它们的大
小也相等,则左上与右下线元电场强度成对抵消,可得圆心
处场强为零.
设电荷线密度为常量 ,因△很小,△L1电荷与△L3电
,因△很小,△L1电荷与△L3电
荷可看做点电荷,其带电量

当
又因为 
与△E1的大小相同,且△E1与△E2方向相反,所以圆心O处的电场强度为零.
 例9:如图7-9所示,半径为R的半圆形绝缘线上、
例9:如图7-9所示,半径为R的半圆形绝缘线上、
下1/4圆弧上分别均匀带电+q和-q,求圆心处的场强.
解析:因圆弧均匀带电, 在圆弧上任取一个微小线元,
由于带电线元很小,可以看成点电荷. 用点电荷场强公式表
示它在圆心处的分场强,再应用叠加原理计算出合场强. 由
对称性分别求出合场强的方向再求出其值.
在带正电的圆孤上取一微小线元,由于圆弧均匀带电,因而线密度 .
.
 在带负电的圆弧上必定存在着一个与之对称的线元, 两者产生
在带负电的圆弧上必定存在着一个与之对称的线元, 两者产生
的场强如图7-9-甲所示. 显然, 两者大小相等,其方向分别与x
轴的正、负方向成角,且在x轴方向上分量相等.由于很小,可以认
为是点电荷,两线元在O点的场强为
方向沿y轴的负方向,所以O点的合场强应对△E求和.
 即
即 .
.
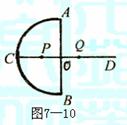
例10:电荷q均匀分布在半球面ACB上,球面的半径为R,
CD为通过半球顶点C与球心O的轴线,如图7-10所示,P、Q
为CD轴线上在O点两侧,离O点距离相等的两点,已知P点的
电势为UP,试求Q点的电势UQ.
解析:可以设想一个均匀带电、带电量也是q的右半球,与题
中所给的左半球组成一个完整的均匀带电球面,根据对称性来解.
由对称性可知,右半球在P点的电势 等于左半球在Q点的电势UQ.
等于左半球在Q点的电势UQ.
 即
即 正是两个半球在P点的电势,因为球面均匀带电,所以
正是两个半球在P点的电势,因为球面均匀带电,所以 由此解得Q点的电势
由此解得Q点的电势 .
.
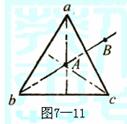
例11:如图7-11所示, 三根等长的细绝缘棒连接成等边三
角形,A点为三角形的内心, B点与三角形共面且与A相对ac棒
对称,三棒带有均匀分布的电荷,此时测得A、B两点的电势各为
UA、UB,现将ac棒取走,而ab、bc棒的电荷分布不变,求这时A、
B两点的电势 、
、 .
.
解析:ab、bc、ac三根棒中的电荷对称分布,各自对A点电势的贡献相同,ac棒对B点电势的贡献和对A点电势的贡献相同,而ab、bc棒对B点电势的贡献也相同.
设ab、bc、ac棒各自在A点的电势为U1,ab、bc棒在B点的电势为U2. 由对称性知,ac棒在B点的电势为U1.
由电势叠加原理得:
3U1=UA ①
U1+2U2=UB ②
由①、②两式得 U1=UA/3
将ac棒取走后,A、B两点的电势分别为
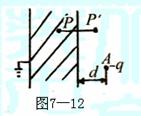
例12:如图7-12所示为一块很大的接地导体板,在与
导体板相距为d的A处放有带电量为-q的点电荷.
(1)试求板上感应电荷在导体内P点产生的电场强度;
(2)试求感应电荷在导体外P′点产生的电场强度(P
与P′点对导体板右表面是对称的);
(3)在本题情形,试分析证明导体表面附近的电场强度
的方向与导体表面垂直;
(4)试求导体上的感应电荷对点电荷-q的作用力;
(5)若在切断导体板与地的连线后,再将+Q电荷置于导体板上,试说明这部分电荷在导体板上如何分布可达到静电平衡(略去边缘效应).
解析:在讨论一个点电荷受到面电荷(如导体表面的感应电荷)的作用时,根据“镜像法”可以设想一个“像电荷”,并使它的电场可以代替面电荷的电场,从而把问题大大简化.
 (1)导体板静电平衡后有 E感=E点,且方向相反,因此板上感应电荷在导体内P点产生的场强为
(1)导体板静电平衡后有 E感=E点,且方向相反,因此板上感应电荷在导体内P点产生的场强为 ,
,
r为AP间距离,方向沿AP,如图7-12甲所示.
(2)因为导体接地,感应电荷分布在右表面,感应电荷在
P点和P′点的电场具有对称性,因此有 ,方向如图
,方向如图
7-12-甲所示.

 (3)考察导体板在表面两侧很靠近表面的两点P1和
(3)考察导体板在表面两侧很靠近表面的两点P1和 .如
.如
前述分析,在导体外点感应电荷产生的场强大小为 .
.
点电荷在点产生的场强大小也是 . 方向如图7-12
. 方向如图7-12
-乙. 从图看出,点的场强为上述两个场强的矢量和,即与导体表面垂直.
(4)重复(2)的分析可知,感应电荷在-q所在处A点的场强为 ,方向垂直于导体板指向右方,该场作用于点电荷-q的电场力为
,方向垂直于导体板指向右方,该场作用于点电荷-q的电场力为 ,负号表示力的方向垂直于导体板指向左方.
,负号表示力的方向垂直于导体板指向左方.
(5)切断接地线后,导体板上原来的感应电荷仍保持原来的分布,导体内场强为零.在此情况下再将+Q电荷加在导体板上,只要新增加的电荷在导体内部各处的场强为零,即可保持静电平衡,我们知道电荷均匀分布在导体板的两侧表面时,上述条件即可满足.显然这时+Q将均匀分布在导体板的两侧面上,才能保证板内场强为零,实现静电平衡.
11.火车重为G,恒定牵引力为F,阻力为f。当它从静止出发,由车站沿直线驶过s距离到另一站停止,如果途中不用刹车。
(1)求车行驶的最少时间是多少?
(2)途中最大速度是多少?
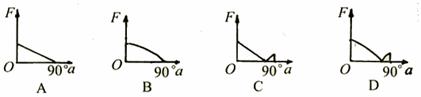
10.一均匀的直角三角形木板ABC,可绕垂直纸面通过C点的水平转动,如图11-15所示。现用一始终沿直角边AB的、作用于A点的力F使BC边缓慢地由水平位置转至竖直位置,在此过程中,力F的大小随角α变化的图线是图11-15-甲中的 ( )
|
9.沿光滑水平面在同一条直线上运动的A、B两物体相碰后共同运动,该过程的位移图象如图11-14所示。可以得出A、B的质量比为 。
8.质量m=1kg的物体A开始时静止在光滑水平地面上,在第1、3、5……奇数秒内,给A施加同向的2N 的水平推力F,在2、4、6……偶数秒内,不给施加力的作用,问经多少时间,A可完成s=100m的位移。
7.A、B两点相距s,将s平分为n等份。今让一物体(可视为质点)从A点由静止开始向B做加速运动,但每过一个等分点,加速度都增加a/n,试求该物体到达B点的速度。
4.一质点沿x轴做直线运动,其中v随时间t的变化如图11-11(a)所示,设t=0时,质点位于坐标原点O处。试根据v-t图分别在11-11(b)及图11-11(c)中尽可能准确地画出( )
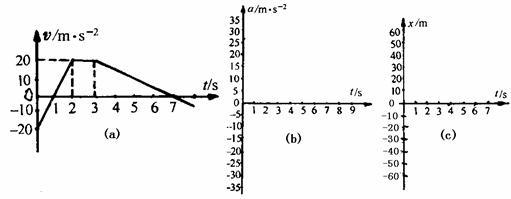
图11-11
 (1)表示质点运动的加速度a随时间t变化关纱的a-t图;
(1)表示质点运动的加速度a随时间t变化关纱的a-t图;
(2)表示质点运动的位移x随时间t变化关系的x-t图。
|
|
3.在有空气阻力的情况下,以初速v1竖直上抛一个物体,经过时间t1到达最高点。又经过时间t2,物体由最高点落回到抛出点,这时物体的速度为v2,则 ( )
A.v2=v1 t2=t1 B.v2>v1 t2>t1
C.v2<v1 t2>t1 D.v2<v1 t2<t1
2.一物体做匀变速直线运动,某时刻速度的大小为4米/秒,1秒钟后速度的大小变为10米/秒。在这1秒钟内该物体的 ( )
A.位移的大小可能小于4米 B.位移的大小可能大于10米
C.加速度的大小可能小于4米/秒2 D.加速度的大小可能大于10米/秒2
方法简介
图像法是根据题意把抽象复杂的物理过程有针对性地表示成物理图像,将物理量间的代数关系转变为几何关系,运用图像直观、形象、简明的特点,来分析解决物理问题,由此达到化难为易,化繁为简的目的,图像法在处理某些运动问题,变力做功问题时是一种非常有效的方法。
赛题精讲
例1:一火车沿直线轨道从静止发出由A地驶向B地,并停止在B地。AB两地相距s,火车做加速运动时,其加速度最大为a1,做减速运动时,其加速度的绝对值最大为a2,由此可可以判断出该火车由A到B所需的最短时间为 。
解析:整个过程中火车先做匀加速运动,后做匀减速运动,加速度最大时,所用时间最短,分段运动可用图像法来解。
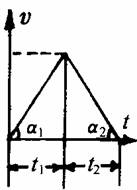 根据题意作v-t图,如图11-1所示。
根据题意作v-t图,如图11-1所示。
|

由①、②、③解得
例2:两辆完全相同的汽车,沿水平直路一前一后匀速行驶,速度为v0,若前车突然以恒定的加速度刹车,在它刚停住时,后车以前车刹车时的加速度开始刹车。已知前车在刹车过程中所行的距离为s,若要保证两辆车在上述情况中不相碰,则两车在做匀速行驶时保持的距离至少为 ( )
A.s B.2s C.3s D.4s
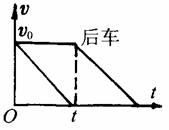 解析:物体做直线运动时,其位移可用速度--时间图像中的面积来表示,故可用图像法做。
解析:物体做直线运动时,其位移可用速度--时间图像中的面积来表示,故可用图像法做。
作两物体运动的v-t图像如图11-2所示,前车发生的位移s为三角形v0Ot的面积,由于前后两车的刹车加速度相同,根据对称性,后车发生的位移为梯形的面积S′=3S,两车的位移之差应为不相碰时,两车匀速行驶时保持的最小车距2s.
|
例3:一只老鼠从老鼠洞沿直线爬出,已知爬出速度v的大小与距老鼠洞中心的距离s成反比,当老鼠到达距老鼠洞中心距离s1=1m的A点时,速度大小为v1=20cm/s,问当老鼠到达距老鼠洞中心s2=2m的B点时,其速度大小v2=?老鼠从A点到达B点所用的时间t=?
|
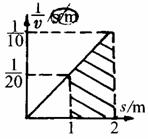 解析:因为老鼠从老鼠洞沿直线爬出,已知爬出的速度与通过的距离成反比,则不能通过匀速运动、匀变速运动公式直接求解,但可以通过图像法求解,因为在
解析:因为老鼠从老鼠洞沿直线爬出,已知爬出的速度与通过的距离成反比,则不能通过匀速运动、匀变速运动公式直接求解,但可以通过图像法求解,因为在 图像中,所围面积即为所求的时间。以距离s为横轴,
图像中,所围面积即为所求的时间。以距离s为横轴, 为纵轴建立直角坐标系,则s与成正比,作-s图像如图11-3所示,由图可得s=2m时,老鼠的速度为10cm/s。在1m到2m之间图像与横轴包围的面积即为所求的时间,所以老鼠从A到B爬行的时间为
为纵轴建立直角坐标系,则s与成正比,作-s图像如图11-3所示,由图可得s=2m时,老鼠的速度为10cm/s。在1m到2m之间图像与横轴包围的面积即为所求的时间,所以老鼠从A到B爬行的时间为
|
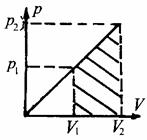
解析:求此过程中气体的内能增加了多少,要用热力学第一定律,由已知条件可知,关键是要求出气体对外做了多少功,而功可用p-V图像中所围的面积来计算。
以缸内气体为研究对象,根据克拉珀龙方程:
pV=μRt ①
又由已知条件有T=KV2 ②
①、②两式可得:p=μRKV
可见气体膨胀时,其压强p与体积V成正比例。
因此作p-V图,如图11-4所示,图中阴影区的面积表示气体在此过程中,对外所做的功W.

再由热力学第一定律,可知此过程中气体内能的增加量为

|
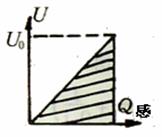 解析:球内、外表面上的感应电荷的电量随着放在球心的电荷电量的改变而改变,感应电荷在球心处产生的电势
解析:球内、外表面上的感应电荷的电量随着放在球心的电荷电量的改变而改变,感应电荷在球心处产生的电势 也与感应电荷的电量Q感成正比,利用U-Q感的图像也可以求出外力做的功。
也与感应电荷的电量Q感成正比,利用U-Q感的图像也可以求出外力做的功。
感应电荷在球心O处产生的电势为U0,则
|

例6:电源电动势为ε,内电阻为r,试求其外电阻为何值时,电源的输出功率最大?
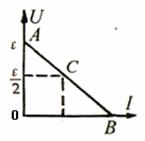 解析:根据全电路欧姆定律得
解析:根据全电路欧姆定律得 由此可知当ε、r不变时,U随I线性变化,作U-I图,图中所围面积为功率。
由此可知当ε、r不变时,U随I线性变化,作U-I图,图中所围面积为功率。
|
 故作U-I图如图11-6所示,以AB线上任意一点和坐标原点为相对顶点所围成的矩形的面积为
故作U-I图如图11-6所示,以AB线上任意一点和坐标原点为相对顶点所围成的矩形的面积为
S=IU
显然S表示此时电源对应的输出功率,要使电源的输出功率最大,即要此矩形的面积最大,由几何知识得,当一个顶点位于AB线段中点C处的矩形面积最大,从图中可得
 ①
①
根据欧姆定律有 ②
②
由①、②解得R=r
即当外电阻R+r时,电源的输出功率最大,其最大值为
|
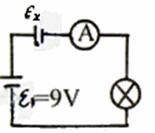 例7:在11-7图中,安培表的读数为I1=20mA。如果电池εx反向联结,电流增加到I2=35mA。如果电灯发生短路时,电路中的电流I等于多少?灯泡的伏安特性曲线如图11-7-甲所示。
例7:在11-7图中,安培表的读数为I1=20mA。如果电池εx反向联结,电流增加到I2=35mA。如果电灯发生短路时,电路中的电流I等于多少?灯泡的伏安特性曲线如图11-7-甲所示。
 解析:题目中给出ε1的数值为9V,εx的大小不确定。当εx从正向变为反向联结时,回路的总电动势增大,在εx<ε1和εx>ε1的两种情况下,I2都有可能增加。所以要分两种情况讨论。
解析:题目中给出ε1的数值为9V,εx的大小不确定。当εx从正向变为反向联结时,回路的总电动势增大,在εx<ε1和εx>ε1的两种情况下,I2都有可能增加。所以要分两种情况讨论。
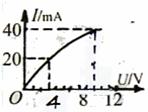
由灯泡的伏安特性曲线可知:
当I1=20mA时,有U灯1=3V,I2=35mA时,U灯2=9V
|
路电压方程有:
(1)当 ①
①
 ②
②
由①+②得
所以
将③式代入①式得 ③
③
短路瞬间,可视电灯两端电压为零,所以原电路中的电流
(2)当 ④
④
 ⑤
⑤
⑤-④得:
所以 R内=12000/15Ω ⑥
将⑥式代入④式得:
 当回路短路时,电流为
当回路短路时,电流为
|
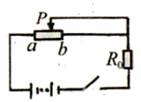
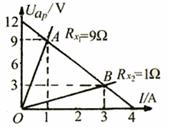
解析:由闭合电路欧姆定律作aP两端的Uap-I图像,因图上任意一点的Uap与I所对应的矩形面积是外电路电阻Rx的输出功率,从而由已知Rx的功率求出对应的Rx值。
根据闭合电路欧姆定律
|

 作
作 图像如图11-8-甲所示,由图可分析找到滑动变阻器的发热功率为9W的A点和B点,所以Rx有两个值。
图像如图11-8-甲所示,由图可分析找到滑动变阻器的发热功率为9W的A点和B点,所以Rx有两个值。

|
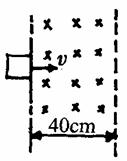
解析:可将切割磁感应线的导体等效为电源按闭合电路来考虑,也可以直接用法拉第电磁感应定律按闭合电路来考虑。
半导线框部分进入磁场时,有恒定的感应电流,当整体全部进入磁场时,无感应电流,当导线框部分离开磁场时,又能产生相反方向的感应电流。所以应选C。
例10:LC振荡回路中电容器两端的电压U随时间t变化的关系如图11-10所示,则( )
 A.在时刻t1,电路中的电流最大
A.在时刻t1,电路中的电流最大
B.在时刻t2,电路中磁场能最大
C.从时刻t2至t3,电路中的电场能不断增大
D.从时刻t3至t4,电容的带电量不断增大
|
针对训练
1.汽车甲沿着平直的公路以速度v0做匀速直线运动。当它路过某处的同时,该处有一辆汽车乙开始做初速为零的匀加速运动去追赶甲车。根据上述的已知条件 ( )
A.可求出乙车追上甲车时乙车的速度
B.可求出乙车追上甲车时乙车所走的路程
C.可求出乙车从开始起动到追上甲车时所用的时间
D.不能求出上述三者中任何一个
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com