2.模块机器人具有三个部分,它们分别是传感器、控制器和执行器。模块机器人的控制器内存有5种控制方法,可使用的传感器大致有5类,列表如下
|
序号 |
控制方法 |
序号 |
传感器 |
|
01 |
即时控制 |
01 |
位移传感器 |
|
02 |
延时控制 |
02 |
声传感器 |
|
03 |
“与”门控制 |
03 |
温度传感器 |
|
04 |
“或”门控制 |
04 |
光传感器 |
|
05 |
“非”门控制 |
05 |
磁传感器 |
执行模块为小灯模块、电动机模块。某位同学要设计一个装置,当有光照射且有声音时,电动机才会转,则应选择的控制序号和传感器序号正确的是 ( )
A.01,02 04 B.04,03 05 C.03,02 04 D.02, 03 04
1.伽利略为了研究自由落体的规律,将落体实验转化为著名的“斜面实验”,从而创造了一种科学研究的方法。利用斜面实验主要是考虑到 ( )
A.实验时便于测量小球运动的速度和路程
B.实验时便于测量小球运动的时间
C.实验时便于测量小球运动的路程
D.斜面实验可以通过观察与计算直接得到落体的运动规律
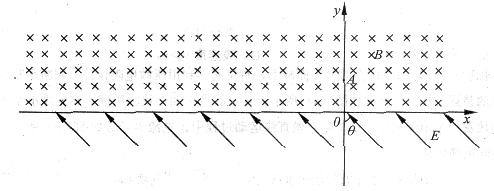
16.(16分)在如图所示,x轴上方有一匀强磁场,磁感应强度的方向垂直于纸面向里,大小为B,x轴下方有一匀强电场,电场强度的大小为E,方向与y轴的夹角θ为45。且斜 向上方.现有一质量为m电量为q的正离子以速度V0由y轴上的A点沿.y轴正方向射入磁场,该离子在磁场中运动一段时间后从x轴上的c点进入电场区域,该离子经c 点时的速度方向与x轴夹角为45 0.不计离子的重力,设磁场区域和电场区域足够大. 求:
(1)c点的坐标;
(2)离子从A点出发到第三次穿越x轴时的运动时间;
(3)离子第四次穿越x轴时速度的大小及速度方向与电场方向的夹角,
江苏省九所名校09届高三第一次联合调研测试
15.(15分)如图所示,电阻忽略不计的、两根两平行的光滑金属导轨竖直放置,其上端接一阻值为3Ω的定值电阻R。在水平虚线L1、L2间有一与导轨所在平面垂直的匀强磁场B,磁场区域的高度为d=0.5m。导体棒a的质量ma=0.2kg、电阻Ra=3Ω;导体棒b的质量mb=0.1kg、电阻Rb=6Ω,它们分别从图中M、N处同时由静止开始在导轨上无摩擦向下滑动,且都能匀速穿过磁场区域,当b 刚穿出磁场时a正好进入磁场.设重力加速度为g=10m/s2。(不计a、b之间的作用)求:
(1)在整个过程中,a、b两棒克服安培力分别做的功;
 (2)M点和N点距L1的高度。
(2)M点和N点距L1的高度。
14.(15分)某边防哨所附近的冰山上,突然发生了一次“滑坡”事件,一块质量m=840kg的冰块滑下山坡后,直对着水平地面上正前方的精密仪器室(见图(a)中的CDEF)冲去。值勤的战士目测现场情况判断,冰块要经过的路线分前、后两段,分界线为AB.已知前一段路面与冰块的动摩檫因数μ= ,后一段路面与冰块的动摩檫因数很小可忽略不计。为防止仪
,后一段路面与冰块的动摩檫因数很小可忽略不计。为防止仪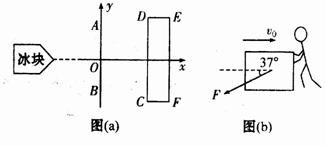 器受损,值勤战士在前一段中,迅即逆着与冰块滑来的水平方向成37
器受损,值勤战士在前一段中,迅即逆着与冰块滑来的水平方向成37 斜向下用F=875N的力阻挡冰块滑行,如图(b)所示。设冰块的初速度为v
斜向下用F=875N的力阻挡冰块滑行,如图(b)所示。设冰块的初速度为v =6.00m/s,在前一段路沿直线滑过4.00m后,到达两段路面的分界线。冰块进入后一段路面后,值勤战士再沿垂直v的方向(y轴正方向),用相同大小的力侧推冰块。(取g=10m/s
=6.00m/s,在前一段路沿直线滑过4.00m后,到达两段路面的分界线。冰块进入后一段路面后,值勤战士再沿垂直v的方向(y轴正方向),用相同大小的力侧推冰块。(取g=10m/s ;以分界线为y轴,冰块的运动方向为x轴建立平面直角坐标系。)求:
;以分界线为y轴,冰块的运动方向为x轴建立平面直角坐标系。)求:
(1)冰块滑到分界线时的速度大小v
(2)若仪器室D点坐标为(10.0m,5.00m);C点坐标为(10.0m,-5.00m),则此冰块能否碰到仪器室?试通过计算说明。
13. (15分) 内壁光滑的圆环状管子固定在竖直平面内,环的圆心位于坐标圆点,圆环的半径为R,x轴位于水平面内,匀强电场在竖直平面内方向竖直向下,y轴左侧场强大小
(15分) 内壁光滑的圆环状管子固定在竖直平面内,环的圆心位于坐标圆点,圆环的半径为R,x轴位于水平面内,匀强电场在竖直平面内方向竖直向下,y轴左侧场强大小 ,右侧场强大小为
,右侧场强大小为 .质量为m、电荷量为q的带正电小球从A点进入管中并沿逆时针方向运动,小球的直径略小于管子的内径,小球的初速度不计,求:
.质量为m、电荷量为q的带正电小球从A点进入管中并沿逆时针方向运动,小球的直径略小于管子的内径,小球的初速度不计,求:
(1)小球到达B点时的加速度;
(2)小球到达C点时对圆环的压力;
(3)通过进一步计算说明这种物理模型存在的问题及形成原因.
12.(10分)如图所示,AB为竖直墙壁,A点和P点在同一水平面上。空间存 在着竖直方向的匀强电场。将一带电小球从P点以速度 向A抛出,结果打在墙上的C处。若撤去电场,将小球从P点以初速
向A抛出,结果打在墙上的C处。若撤去电场,将小球从P点以初速 向A抛出,也正好打在墙上的C点。求:
向A抛出,也正好打在墙上的C点。求:
 (1)第一次抛出后小球所受电场力和重力之比
(1)第一次抛出后小球所受电场力和重力之比
(2)小球两次到达C点时速度之比
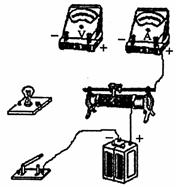
11.(10分)一只小灯泡,标有“3V、0.6W”字样。现用右下图给出的器材测量该小灯泡正常发光时的电阻R1。(滑动变阻器最大阻值为10Ω;电源电动势为12V,内阻为1Ω;电流表内阻为1Ω,电压表的内阻为10kΩ)。
(1)在设计电路的过程中,为了尽量减小实验误差,电流表应采用 (选填“内接”或“外接”)法。滑动变阻器的连接方式应采用 (选填“分压式”或“限流式”)
(2)将你所设计的实验电路图(尽量减小实验误差)画在左下方的虚线框中。
(3)用笔画线当导线,根据设计的电路图将实物图连成完整的电路(图中有三根导线已经接好)。开始时,滑动变阻器的滑动触头应该移到最 端(选填“左”或“右”)。
(4)若小灯泡发光暗时的电阻为R2,你根据所学的知识可判断出R1与R2的大小关系为:R1 R2(选填“大于”、“等于”或“小于”)
10.(8分)用铁架台将长木板倾斜支在水平桌面上,在长木板上安装两个光电门A、B,在一木块上粘一宽度为△x的遮光条。让木块从长木板的顶端滑下,依次经过A、B两光电门,光电门记录的时间分别为△ 和△
和△ 。实验器材还有电源、导线、开关和米尺(图中未画出)。
。实验器材还有电源、导线、开关和米尺(图中未画出)。
 (1)为了计算木块运动的加速度,还需测量的物理量是 _________(用字母表示,并在图中标出);用题给的条件和你测量的物理量表示出加速度a=_____________;
(1)为了计算木块运动的加速度,还需测量的物理量是 _________(用字母表示,并在图中标出);用题给的条件和你测量的物理量表示出加速度a=_____________;
(2)为了测定木块与木板间的动摩擦因数,还需测量的物理量有__________(用字母表示,并在图中标出);用加速度a、重力加速度g和你测量的物理量表示出动摩擦因数μ=________。
9. 如图所示,可视为质点的物块A放在物体B上,A、B之间有摩擦,水平地面光滑。现将物块A从物体B的顶端由静止释放,在滑到物体B的底端前,下列说法正确的是
如图所示,可视为质点的物块A放在物体B上,A、B之间有摩擦,水平地面光滑。现将物块A从物体B的顶端由静止释放,在滑到物体B的底端前,下列说法正确的是
A.若物体B固定,则物块A减少的重力势能等于它的动能和系统增加的内能之和
B.若物体B不固定,则物块A减少的机械能等于物体B增加的机械能
C.在物体B固定与不固定的两种情况下,系统重力势能的减少量相等
D.在物体B固定与不固定的两种情况下,摩擦产生的热量不等
第二卷(非选择题共89分)
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com