3ЁЂНЋv1 ЁЂvЕФЬцДњЪНДњШыЂйЪННтv2МДПЩЁЃНсЙћЃКv2 = 
(бЇЩњЛюЖЏ)ЫМПМЃКЧђаЮНТСДДЅЕиЧАвЛЫВЃЌзѓЧђЁЂНТСДКЭгвЧђЕФЫйЖШЗжБ№ЪЧЖрЩйЃП
НтЃКгЩСНИЫВЛПЩаЮБфЃЌжЊШ§ЧђЕФЫЎЦНЫйЖШОљЮЊСуЃЌІШЮЊСуЁЃвЛИіФмСПЗНГЬзувдНтЬтЁЃ
Д№ЃК0 ЁЂ ЁЂ0 ЁЃ
ЁЂ0 ЁЃ
(бЇЩњЛюЖЏ)ЫМПМЃКЕБСНИЫМаНЧЮЊ90ЁуЪБЃЌгвБпаЁЧђЕФЮЛвЦЪЧЖрЩйЃП
НтЃКЫЎЦНЗНЯђгУЁАЗДГхЮЛвЦЖЈЪНЁБЃЌЛђЫЎЦНЗНЯђгУжЪаФдЫЖЏЖЈТЩЁЃ
Д№ЃК ЁЃ
ЁЃ
 НјНзгІгУЃКдкБОНВФЃаЭЁАЫФЁЂЗДГхЁЁЁБЕФЁАНјНзгІгУЁБ(МћЭМ8)жаЃЌЕБжЪЕуmЛЌЕНЗНЮЛНЧІШЪБ(ЮДЭбРыАыЧђ)ЃЌжЪЕуЕФЫйЖШvЕФДѓаЁЁЂЗНЯђдѕбљЃП
НјНзгІгУЃКдкБОНВФЃаЭЁАЫФЁЂЗДГхЁЁЁБЕФЁАНјНзгІгУЁБ(МћЭМ8)жаЃЌЕБжЪЕуmЛЌЕНЗНЮЛНЧІШЪБ(ЮДЭбРыАыЧђ)ЃЌжЪЕуЕФЫйЖШvЕФДѓаЁЁЂЗНЯђдѕбљЃП
НтЫЕЃКДЫР§злКЯгІгУдЫЖЏКЯГЩЁЂЖЏСПЪиКуЁЂЛњаЕФмЪиКужЊЪЖЃЌЪ§бЇдЫЫуБШНЯЗБИДЃЌЪЧвЛЕРПМВщбЇЩњИїжжФмСІКЭЫижЪЕФФбЬтЁЃ
ОндЫЖЏЕФКЯГЩЃЌгаЃК
 ЁЁ=
ЁЁ=  ЁЁ+
ЁЁ+  ЁЁ= ЁЁ-
ЁЁ= ЁЁ-
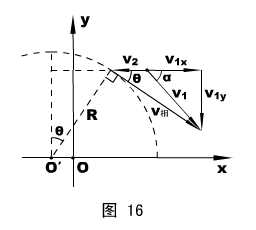
ЦфжаБиШЛЪЧбиЕиУцЯђзѓЕФЃЌЮЊСЫЪщаДЗНБуЃЌЮвУЧЩшЦфДѓаЁЮЊv2 ЃЛБиШЛЪЧбиАыЧђЫВЪБЮЛжУЧаЯпЗНЯђ(ДЙжБЫВЪБАыОЖ)ЕФЃЌЩшДѓаЁЮЊvЯр ЁЃИљОнЪИСПМѕЗЈЕФШ§НЧаЮЗЈдђЃЌПЩвдЕУЕН(ЩшДѓаЁЮЊv1)ЕФЪОвтЭМЃЌШчЭМ16ЫљЪОЁЃЭЌЪБЃЌЮвУЧНЋv1ЕФxЁЂyЗжСПv1xКЭv1yвВУшЛцдкЭМжаЁЃ
гЩЭМПЩЕУЃКv1y =(v2 + v1x)tgІШЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ Ђй
жЪЕуКЭАыЧђЯЕЭГЫЎЦНЗНЯђЖЏСПЪиКуЃЌгаЃКMv2 = mv1xЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ Ђк
ЖдЬтЩшЙ§ГЬЃЌжЪЕуКЭАыЧђЯЕЭГЛњаЕФмЪиКуЃЌгаЃКmgR(1-cosІШ) =  M
M + m ЃЌМДЃК
+ m ЃЌМДЃК
mgR(1-cosІШ) = M + m( +
+  )ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ
Ђл
)ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ
Ђл
Ш§ИіЗНГЬЃЌНтШ§ИіЮДжЊСП(v2 ЁЂv1x ЁЂv1y)ЪЧПЩааЕФЃЌЕЋЪ§бЇдЫЫуЗБИДЃЌЭЦМіВНжшШчЯТ--
2ЁЂдкЛиЕНЂлЁЂЂмСНЪНЃЌЕУЃК
v1 =  v2 ,ЁЁ v =
v2 ,ЁЁ v =  v2
v2
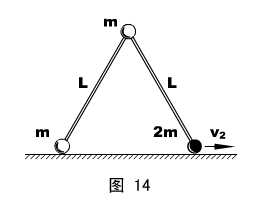 ЮяРэЧщаЮЃКШчЭМ14ЫљЪОЃЌСНИљГЄЖШОљЮЊLЕФИеадЧсИЫЃЌвЛЖЫЭЈЙ§жЪСПЮЊmЕФЧђаЮНТСДСЌНгЃЌСэвЛЖЫЗжБ№гыжЪСПЮЊmКЭ2mЕФаЁЧђЯрСЌЁЃНЋДЫзАжУЕФСНИЫКЯТЃЃЌНТСДдкЩЯЁЂЪњжБЕиЗХдкЫЎЦНзРУцЩЯЃЌШЛКѓЧсЧУвЛЯТЃЌЪЙСНаЁЧђЯђСНБпЛЌЖЏЃЌЕЋСНИЫЪМжеБЃГждкЪњжБЦНУцФкЁЃКіТдвЛЧаФІВСЃЌЪдЧѓЃКСНИЫМаНЧЮЊ90ЁуЪБЃЌжЪСПЮЊ2mЕФаЁЧђЕФЫйЖШv2 ЁЃ
ЮяРэЧщаЮЃКШчЭМ14ЫљЪОЃЌСНИљГЄЖШОљЮЊLЕФИеадЧсИЫЃЌвЛЖЫЭЈЙ§жЪСПЮЊmЕФЧђаЮНТСДСЌНгЃЌСэвЛЖЫЗжБ№гыжЪСПЮЊmКЭ2mЕФаЁЧђЯрСЌЁЃНЋДЫзАжУЕФСНИЫКЯТЃЃЌНТСДдкЩЯЁЂЪњжБЕиЗХдкЫЎЦНзРУцЩЯЃЌШЛКѓЧсЧУвЛЯТЃЌЪЙСНаЁЧђЯђСНБпЛЌЖЏЃЌЕЋСНИЫЪМжеБЃГждкЪњжБЦНУцФкЁЃКіТдвЛЧаФІВСЃЌЪдЧѓЃКСНИЫМаНЧЮЊ90ЁуЪБЃЌжЪСПЮЊ2mЕФаЁЧђЕФЫйЖШv2 ЁЃ
ФЃаЭЗжЮіЃКШ§ЧђЯЕЭГЛњаЕФмЪиКуЁЂЫЎЦНЗНЯђЖЏСПЪиКуЃЌВЂзЂвтдМЪјЙиЯЕ--СНИЫВЛПЩЩьГЄЁЃ
(бЇЩњЛюЖЏ)ГѕВНХаЖЯЃКзѓБпаЁЧђКЭЧђаЮНТСДЕФЫйЖШЗНЯђЛсдѕбљЃП
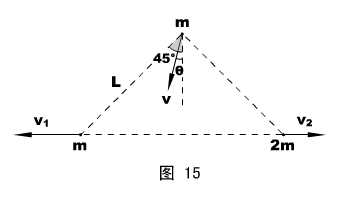
ЩшФЉЬЌ(ИЫМаНЧ90Ёу)зѓБпаЁЧђЕФЫйЖШЮЊv1(ЗНЯђЃКЫЎЦНЯђзѓ)ЃЌЧђаЮНТСДЕФЫйЖШЮЊv(ЗНЯђЃККЭЪњжБЗНЯђМаІШНЧаБЯђзѓ)ЃЌ
ЖдЬтЩшЙ§ГЬЃЌШ§ЧђЯЕЭГЛњаЕФмЪиКуЃЌгаЃК
 mg( L-
mg( L- L) = m + mv2 + 2mЁЁЁЁ Ђй
L) = m + mv2 + 2mЁЁЁЁ Ђй
Ш§ЧђЯЕЭГЫЎЦНЗНЯђЖЏСПЪиКуЃЌгаЃК
mv1 + mvsinІШ= 2mv2ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ Ђк
зѓБпИЫзгВЛаЮБфЃЌгаЃК
v1cos45Ёу= vcos(45Ёу-ІШ)ЁЁЁЁЁЁЁЁЁЁ Ђл
гвБпИЫзгВЛаЮБфЃЌгаЃК
vcos(45Ёу+ІШ) = v2cos45ЁуЁЁЁЁЁЁЁЁ Ђм
ЫФИіЗНГЬЃЌНтЫФИіЮДжЊСП(v1 ЁЂv2 ЁЂvКЭІШ)ЃЌЪЧПЩааЕФЁЃЭЦМіНтЗНГЬЕФВНжшШчЯТ--
1ЁЂЂлЁЂЂмСНЪНгУv2ЬцДњv1КЭv ЃЌДњШыЂкЪНЃЌНтІШжЕЃЌЕУЃКtgІШ= 1/4
ЮяРэЧщаЮЃКШчЭМ13ЫљЪОЃЌжБНЧаЮЕФИеадИЫБЛЙЬЖЈЃЌЫЎЦНКЭЪњжБВПЗжОљзуЙЛГЄЁЃжЪСПЗжБ№ЮЊm1КЭm2ЕФAЁЂBСНИігаПзаЁЧђЃЌДЎдкИЫЩЯЃЌЧвБЛГЄЮЊLЕФЧсЩўЯрСЌЁЃКіТдСНЧђЕФДѓаЁЃЌГѕЬЌЪБЃЌШЯЮЊЫќУЧЕФЮЛжУдкЭЌвЛИпЖШЃЌЧвЩўДІгкРжБзДЬЌЁЃЯжЮоГѕЫйЕиНЋЯЕЭГЪЭЗХЃЌКіТдвЛЧаФІВСЃЌЪдЧѓBЧђдЫЖЏL/2ЪБЕФЫйЖШv2 ЁЃ
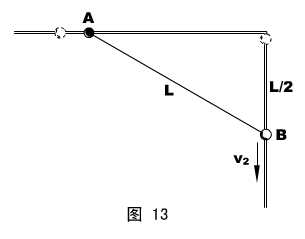 ФЃаЭЗжЮіЃКAЁЂBЯЕЭГЛњаЕФмЪиКуЁЃAЁЂBСНЧђЕФЫВЪБЫйЖШВЛЕШЃЌЦфЙиЯЕПЩОнЁАЕкШ§ВПЗжЁБжЊЪЖНщЩмЕФЖЈЪН(ЛЌТжаЁДЌ)ШЅбАЧѓЁЃ
ФЃаЭЗжЮіЃКAЁЂBЯЕЭГЛњаЕФмЪиКуЁЃAЁЂBСНЧђЕФЫВЪБЫйЖШВЛЕШЃЌЦфЙиЯЕПЩОнЁАЕкШ§ВПЗжЁБжЊЪЖНщЩмЕФЖЈЪН(ЛЌТжаЁДЌ)ШЅбАЧѓЁЃ
(бЇЩњЛюЖЏ)AЧђЕФЛњаЕФмЪЧЗёЪиКуЃПBЧђЕФЛњаЕФмЪЧЗёЪиКуЃПЯЕЭГЛњаЕФмЪиКуЕФРэгЩЪЧЪВУД(СНЗЈЗжЮіЃКaЁЂЁАЮЂдЊЗЈЁБХаЖЯСНИіWTЕФДњЪ§КЭЮЊСуЃЛbЁЂЮоЗЧЕЏадХізВЃЌЮоФІВСЃЌУЛгаЦфЫќаЮЪНФмЕФЩњГЩ)ЃП
гЩЁАЭиеЙЬѕМўЁБПЩвдХаЖЯЃЌAЁЂBЯЕЭГЛњаЕФмЪиКуЃЌ(ЩшФЉЬЌAЧђЕФЫВЪБЫйТЪЮЊv1 )Й§ГЬЕФЗНГЬЮЊЃК
m2g =
=  ЁЁ+
ЁЁ+  ЁЁЁЁЁЁЁЁЁЁЁЁЂй
ЁЁЁЁЁЁЁЁЁЁЁЁЂй
дкФЉЬЌЃЌЩўгыЫЎЦНИЫЕФЫВЪБМаНЧЮЊ30ЁуЃЌЩшЩўзгЕФЫВЪБЧЈвЦЫйТЪЮЊv ЃЌИљОнЁАЕкШ§ВПЗжЁБжЊЪЖНщЩмЕФЖЈЪНЃЌгаЃК
v1 = v/cos30Ёу, v2 = v/sin30Ёу
СНЪНКЯВЂГЩЃКv1 = v2 tg30Ёу= v2/ЁЁЁЁ Ђк
НтЂйЁЂЂкСНЪНЃЌЕУЃКv2 = 
4ЁЂШчЭМ10ЫљЪОЃЌЫЋЪжгУЕШДѓЗДЯђЕФСІFбЙЙЬЖЈЦћИзСНБпЕФЛюШћЃЌЛюШћвЦЖЏЯрЭЌОрРыSЃЌЦћИзжаЗтБеЦјЬхБЛбЙЫѕЁЃЪЉСІеп(ШЫ)ЪЧЗёзіЙІЃП
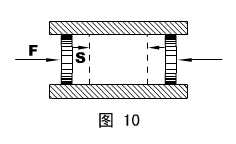 дквдЩЯЫФИіЪТР§жаЃЌSШєШЁзїгУЕуЮЛвЦЃЌжЛгаЕк1ЁЂ2ЁЂ4Р§ЪЧзіЙІЕФ(зЂвтЕк3Р§ЃЌТЅЬнжЇГжСІЕФзїгУЕуВЂЮДвЦЖЏЃЌЖјжЛЪЧдкВЛЭЃЕиНЛЛЛзїгУЕу)ЃЌSШєШЁЮяЬх(ЪмСІеп)жЪаФЮЛвЦЃЌжЛгаЕк2ЁЂ3Р§ЪЧзіЙІЕФЃЌЖјЧвЃЌОЁЙмЕк2Р§ЖМзіСЫЙІЃЌЪ§зжВЂВЛЯрЭЌЁЃЫљвдЃЌгУВЛЭЌЕФХаОнЕУГіЕФНсТлГіЯжСЫБОжЪЕФЗжЦчЁЃ
дквдЩЯЫФИіЪТР§жаЃЌSШєШЁзїгУЕуЮЛвЦЃЌжЛгаЕк1ЁЂ2ЁЂ4Р§ЪЧзіЙІЕФ(зЂвтЕк3Р§ЃЌТЅЬнжЇГжСІЕФзїгУЕуВЂЮДвЦЖЏЃЌЖјжЛЪЧдкВЛЭЃЕиНЛЛЛзїгУЕу)ЃЌSШєШЁЮяЬх(ЪмСІеп)жЪаФЮЛвЦЃЌжЛгаЕк2ЁЂ3Р§ЪЧзіЙІЕФЃЌЖјЧвЃЌОЁЙмЕк2Р§ЖМзіСЫЙІЃЌЪ§зжВЂВЛЯрЭЌЁЃЫљвдЃЌгУВЛЭЌЕФХаОнЕУГіЕФНсТлГіЯжСЫБОжЪЕФЗжЦчЁЃ
УцЖдетаЉЫЦЪЧЖјЗЧЕФЁАвЩФбдгжЂЁБЃЌЮвУЧЯШЛиЕНЁАзіЙІЪЧЮяЬхФмСПзЊЛЏЕФСПЖШЁБетвЛИљБОЕуЁЃ
Ек1Р§ЃЌЪжКЭНВЬЈУцФІВСЩњСЫШШЃЌФкФмЕФЩњГЩБиШЛЪЧгЩШЫЕФЩњЮяФмзЊЛЏЖјРДЃЌШЫПЯЖЈзіСЫЙІЁЃSвЫШЁзїгУЕуЕФЮЛвЦЃЛ
Ек2Р§ЃЌЧѓРСІЕФЙІЃЌдкЧАУцвбОВћЪіЃЌSШЁзїгУЕуЮЛвЦЮЊМбЃЛ
Ек3Р§ЃЌТЅЬнВЛашвЊЪфГіШЮКЮФмСПЃЌВЛзіЙІЃЌSШЁзїгУЕуЮЛвЦЃЛ
Ек4Р§ЃЌЦјЬхФкФмЕФдіМгБиШЛЪЧгЩШЫЪфГіЕФЃЌбЙСІзіЙІЃЌSШЁзїгУЕуЮЛвЦЁЃ
ЕЋЪЧЃЌШчЙћЗжБ№вдЩЯЫФР§жаЕФЪмСІепгУЖЏФмЖЈРэЃЌЕк1Р§ЃЌШЫЖдНВЬЈВЛзіЙІЃЌSШЁЮяЬхжЪаФЮЛвЦЃЛЕк2Р§ЃЌЖЏФмдіСПЖдгІSШЁL/2ЪБЕФжЕ--ЮяЬхжЪаФЮЛвЦЃЛЕк4Р§ЃЌЦјЬхКъЙлЖЏФмЮодіСПЃЌSШЁжЪаФЮЛвЦЁЃ(Ек3Р§ЕФЗжЮіднЪБбгКѓЁЃ)
вдЩЯЗжЮідкдЎв§РэТлжЊЪЖЗНУцЖМУЛгаДэЃЌШчКЮЪЙЫќУЧЭГвЛЃПдРДЃЌЙІЕФИХФюгаЙувхКЭЯСвхжЎЗжЁЃдкСІбЇжаЃЌЙІЕФЯСвхИХФюНіжИЛњаЕФмзЊЛЛЕФСПЖШЃЛЖјдкЮяРэбЇжаЙІЕФЙувхИХФюжИГ§ШШДЋЕнЭтЕФвЛЧаФмСПзЊЛЛЕФСПЖШЁЃЫљвдЙІвВПЩЖЈвхЮЊФмСПзЊЛЛЕФСПЖШЁЃвЛИіЯЕЭГзмФмСПЕФБфЛЏЃЌГЃвдЯЕЭГЖдЭтзіЙІЕФЖрЩйРДСПЖШЁЃФмСППЩвдЪЧЛњаЕФмЁЂЕчФмЁЂШШФмЁЂЛЏбЇФмЕШИїжжаЮЪНЃЌвВПЩвдЖржжаЮЪНЕФФмСПЭЌЪБЗЂЩњзЊЛЏЁЃгЩДЫПЩМћЃЌЩЯУцЗжЮіжаЃЌЕквЛИіРэТлЖдгІЕФЙувхЕФЙІЃЌЕкЖўИіРэТлЖдгІЕФдђЪЧЯСвхЕФЙІЃЌЫќУЧЖМУЛгаДэЮѓЃЌжЛЪЧдкЯжНзЖЮЕФНЬВФжаЛЙУЛгаНЋЫќУЧМАЪБЕиЧјЗжПЊРДЖјвбЁЃ
ЖјЧвЃЌЮвУЧВЛФбЙщФЩЃКЧѓЙувхЕФЙІЃЌSШЁзїгУЕуЕФЮЛвЦЃЛЧѓЯСвхЕФЙІЃЌSШЁЮяЬх(жЪаФ)ЮЛвЦЁЃ
ФЧУДЮвУЧдкНтЬтжаШчКЮДІРэФиЃПетРяИјДѓМвМИЕуНЈвщЃК 1ЁЂГщЯѓЕиНВЁАФГФГСІзіЕФЙІЁБвЛАужИЙувхЕФЙІЃЛ2ЁЂНВЁАСІЖдФГЮяЬхзіЕФЙІЁБГЃГЃжИЯСвхЕФЙІЃЛ3ЁЂЖЏФмЖЈРэжаЕФЙІПЯЖЈЪЧжИЯСвхЕФЙІЁЃ
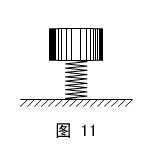
ЕБШЛЃЌЧѓНтЙІЕиЮЪЬтЪБЃЌЛЙвЊзЂвтОпЬхЮЪЬтОпЬхЗжЮіЁЃШчЩЯУцЕФЕк3Р§ЃЌОЭЯрЖдИДдгвЛаЉЁЃШчЙћШЯЮЊЫљЧѓЮЊЯСвхЕФЙІЃЌSШЁжЪаФЮЛвЦЃЌЪЧзіСЫЙІЃЌЕЋНсТлШдШЛЪЧФбвдСюШЫНгЪмЕФЁЃЯТУцЮвУЧРДетбљвЛИіДІРэЃКНЋИДдгЕФаЮБфЮяЬх(ШЫ)ПДГЩетбљвЛИіЯрЖдРэЯыЕФзщКЯЃКИеадЮяЬхЯТУцСЌНгвЛбЙЫѕЕФЕЏЛЩ(ШчЭМ11ЫљЪО)ЃЌШЫУПвЛДЮЕХЬнЃЌЭШЩьжБНЋЧћЬхжиаФЩЯОйЃЌЕШаЇЮЊЕЏЛЩНЋИеадЮяЬхОйЦ№ЁЃетбљЃЌЮвУЧОЭВЛФбЗЂЯжЃЌзіЙІЕФЪЧШЫЕФЫЋЭШЖјЗЧЕиУцЃЌШЫМШЪЧЪфГіФмСП(ЩњЮяФм)ЕФЛњЙЙЃЌвВЪЧЕУЕНФмСП(ЛњаЕФм)ЕФЛњЙЙ--етРяЕФЮяРэЧщаЮИќЯѓЪЧвЛжжЩњЮяЧщаЮЁЃБОЬтЫљЧѓЕФЙІгІРэНтЮЊЙувхЙІЮЊвЫЁЃ
 вдЩЯЫФР§гавЛаЉЙВЭЌЕФЬиЕуЃКвЊУДЃЌЪмСІЮяЬхЧщаЮБШНЯИДдг(аЮБфЃЌВЛФмМђЕЅЕиПДГЩвЛИіжЪЕуЁЃШчЕк2ЁЂЕк3ЁЂЕк4Р§)ЃЌвЊУДЃЌЪЉСІепКЭЪмСІепжЎМфЕФФмСПзЊЛЏВЛЪЧЗтБеЕФ(ЩцМАЕНЕкШ§ЗНЃЌЛђЛњаЕФмвдЭтЕФаЮЪНЁЃШчЕк1Р§)ЁЃвдКѓЃЌЕБгіЕНетбљЕФЮЪЬтЪБЃЌашвЊЮвУЧЩїжиЖдД§ЁЃ
вдЩЯЫФР§гавЛаЉЙВЭЌЕФЬиЕуЃКвЊУДЃЌЪмСІЮяЬхЧщаЮБШНЯИДдг(аЮБфЃЌВЛФмМђЕЅЕиПДГЩвЛИіжЪЕуЁЃШчЕк2ЁЂЕк3ЁЂЕк4Р§)ЃЌвЊУДЃЌЪЉСІепКЭЪмСІепжЎМфЕФФмСПзЊЛЏВЛЪЧЗтБеЕФ(ЩцМАЕНЕкШ§ЗНЃЌЛђЛњаЕФмвдЭтЕФаЮЪНЁЃШчЕк1Р§)ЁЃвдКѓЃЌЕБгіЕНетбљЕФЮЪЬтЪБЃЌашвЊЮвУЧЩїжиЖдД§ЁЃ
(бЇЩњЛюЖЏ)ЫМПМЃКзуЙЛГЄЕФЫЎЦНДЋЫЭДјЮЌГждШЫйvдЫзЊЁЃНЋвЛДќЛѕЮяЮоГѕЫйЕиЗХЩЯШЅЃЌдкЛѕЮяДяЕНЫйЖШvжЎЧАЃЌгыДЋЫЭДјЕФФІВССІДѓаЁЮЊf ЃЌЖдЕиЕФЮЛвЦЮЊS ЁЃЪдЮЪЃКЧѓФІВССІЕФЙІЪБЃЌЪЧЗёПЩвдгУW = fS ЃП
НтЃКАДвЛАуЕФРэНтЃЌетРягІжИЙувхЕФЙІ(ЖдгІДЋЫЭДјв§ЧцЪфГіЕФФмСП)ЃЌЫљвдЁАЮЛвЦЁБШЁзїгУЕуЕФЮЛвЦЁЃзЂвтЃЌдкДЫДІгавЛИівўКЌЕФЁАНЛЛЛзїгУЕуЁБЕФЮЪЬтЃЌзаЯИЗжЮіЃЌВЛФбЗЂЯжЃЌУПвЛИі(ЯрЖдЦЄДјВЛЖЏЕФ)зїгУЕуЕФЮЛвЦЮЊ2S ЁЃ(СэНтЃКЧѓЛѕЮяЖЏФмЕФдіМгКЭгыЦЄДјФІВСЩњШШЕФзмКЭЁЃ)
 Д№ЃКЗёЁЃ
Д№ЃКЗёЁЃ
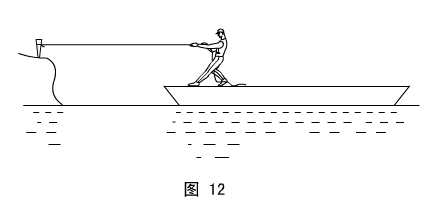
(бЇЩњЛюЖЏ)ЫМПМЃКШчЭМ12ЫљЪОЃЌШЫеОдкДЌЩЯЃЌЭЈЙ§РвЛИљЙЬЖЈдкЬњзЎЕФРТЩўЪЙДЌППАЖЁЃЪдЮЪЃКРТЩўЪЧЗёЖдДЌКЭШЫЕФЯЕЭГзіЙІЃП
НтЃКЗжЮіЭЌЩЯУцЕФЁАЕк3Р§ЁБЁЃ
Д№ЃКЗёЁЃ
3ЁЂШЫЕЧОВжЙЕФТЅЬнЃЌДгвЛТЅЕНЖўТЅЁЃТЅЬнЪЧЗёзіЙІЃП
2ЁЂдкБОЁАВПЗжЁБЕк3вГЭМ1ЕФФЃаЭжаЃЌЧѓРСІзіЙІЪБЃЌSЪЧЗёПЩвдШЁЩўзгжЪаФЕФЮЛвЦЃП
 дкЧѓНтЙІЕФЮЪЬтЪБЃЌгаЪБгіЕНСІЕФзїгУЕуЮЛвЦгыЪмСІЮяЬхЕФ(жЪаФ)ЮЛвЦВЛЕШЃЌSЪЧШЁСІЕФзїгУЕуЕФЮЛвЦЃЌЛЙЪЧШЁЮяЬх(жЪаФ)ЕФЮЛвЦФиЃПЮвУЧЯШПДЯТУцвЛаЉЪТР§ЁЃ
дкЧѓНтЙІЕФЮЪЬтЪБЃЌгаЪБгіЕНСІЕФзїгУЕуЮЛвЦгыЪмСІЮяЬхЕФ(жЪаФ)ЮЛвЦВЛЕШЃЌSЪЧШЁСІЕФзїгУЕуЕФЮЛвЦЃЌЛЙЪЧШЁЮяЬх(жЪаФ)ЕФЮЛвЦФиЃПЮвУЧЯШПДЯТУцвЛаЉЪТР§ЁЃ
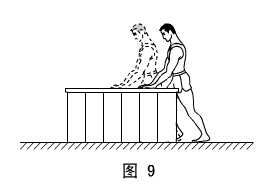
1ЁЂШчЭМ9ЫљЪОЃЌШЫгУЫЋЪжбЙдкЬЈУцЩЯЭЦНВЬЈЃЌНсЙћЫЋЪжЧАНјСЫвЛЖЮЮЛвЦЖјНВЬЈЮДвЦЖЏЁЃЪдЮЪЃКШЫЪЧЗёзіСЫЙІЃП
 ЮяРэЧщаЮЃКШчЭМ4ЫљЪОЃЌГЄЖШЮЊLЁЂжЪСПЮЊMЕФДЌЭЃжЙдкОВЫЎжа(ЕЋЮДХзУЊ)ЃЌДЌЭЗЩЯгавЛИіжЪСПЮЊmЕФШЫЃЌвВЪЧОВжЙЕФЁЃЯждкСюШЫдкДЌЩЯПЊЪМЯђДЌЮВзпЖЏЃЌКіТдЫЎЕФзшСІЃЌЪдЮЪЃКЕБШЫзпЕНДЌЮВЪБЃЌДЌНЋЛсвЦЖЏЖрдЖЃП
ЮяРэЧщаЮЃКШчЭМ4ЫљЪОЃЌГЄЖШЮЊLЁЂжЪСПЮЊMЕФДЌЭЃжЙдкОВЫЎжа(ЕЋЮДХзУЊ)ЃЌДЌЭЗЩЯгавЛИіжЪСПЮЊmЕФШЫЃЌвВЪЧОВжЙЕФЁЃЯждкСюШЫдкДЌЩЯПЊЪМЯђДЌЮВзпЖЏЃЌКіТдЫЎЕФзшСІЃЌЪдЮЪЃКЕБШЫзпЕНДЌЮВЪБЃЌДЌНЋЛсвЦЖЏЖрдЖЃП
(бЇЩњЛюЖЏ)ЫМПМЃКШЫПЩВЛПЩФмдШЫй(ЛђдШМгЫй)зпЖЏЃПЕБШЫжаЭОЭЃЯТанЯЂЃЌДЌгаЫйЖШТ№ЃПШЫЕФШЋГЬЮЛвЦДѓаЁЪЧLТ№ЃПБОЯЕЭГбЁДЌЮЊВЮееЃЌЖЏСПЪиКуТ№ЃП
ФЃаЭЗжЮіЃКЖЏСПЪиКуеЙЪОСЫвбжЊжЪСПЧщПіЯТЕФЫйЖШЙиЯЕЃЌвЊЙ§ЖЩЕНЮЛвЦЙиЯЕЃЌашвЊв§НјдЫЖЏбЇЕФЯрЙиЙцТЩЁЃИљОнЪЕМЪЧщПі(ШЫБиаыЭЃдкДЌЮВ)ЃЌШЫЕФдЫЖЏВЛПЩФмЪЧдШЫйЕФЃЌвВВЛПЩФмЪЧдШМгЫйЕФ,дЫЖЏбЇЕФЙцТЩгІбЁдёS =  t ЁЃЮЊбАЧѓЪБМфt ЃЌдђвЊзЅШЫКЭДЌЕФЮЛвЦдМЪјЙиЯЕЁЃ
t ЁЃЮЊбАЧѓЪБМфt ЃЌдђвЊзЅШЫКЭДЌЕФЮЛвЦдМЪјЙиЯЕЁЃ
ЖдШЫЁЂДЌЯЕЭГЃЌеыЖдЁАПЊЪМзпЖЏЁњжаМфШЮвтЪБПЬЁБЙ§ГЬЃЌгІгУЖЏСПЪиКу(ЩшФЉЬЌШЫЕФЫйТЪЮЊv ЃЌДЌЕФЫйТЪЮЊV)ЃЌСюжИЯђДЌЭЗЗНЯђЮЊе§ЯђЃЌдђЪИСПЙиЯЕПЩвдЛЏЮЊДњЪ§дЫЫуЃЌгаЃК
0 = MV + m(-v)
МДЃКmv = MV
гЩгкЙ§ГЬЕФФЉЬЌЪЧШЮвтбЁШЁЕФЃЌДЫЪНеЙЪОСЫШЫКЭДЌдкШЮвЛЪБПЬЕФЫВЪБЫйЖШДѓаЁЙиЯЕЁЃЖјЧвВЛФбЭЦжЊЃЌЖджаМфЕФШЮвЛЙ§ГЬЃЌСНепЕФЦНОљЫйЖШвВгаетжжЙиЯЕЁЃМДЃК
m = M ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ
Ђй
ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ
Ђй
ЩшШЋГЬЕФЪБМфЮЊt ЃЌГЫШыЂйЪНСНБпЃЌЕУЃКmt = Mt
ЩшsКЭSЗжБ№ЮЊШЫКЭДЌЕФШЋГЬЮЛвЦДѓаЁЃЌИљОнЦНОљЫйЖШЙЋЪНЃЌЕУЃКm s = M SЁЁЁЁЁЁЁЁ Ђк
ЪмДЌГЄLЕФдМЪјЃЌsКЭSОпгаЙиЯЕЃКs + S = LЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ Ђл
НтЂкЁЂЂлПЩЕУЃКДЌЕФвЦЖЏОрРы S =L
(гІгУЖЏСПЪиКуНтЬтЪБЃЌвВПЩвдШЋВПЖМгУЪИСПЙиЯЕЃЌЕЋетЪБЁАЮЛвЦЙиЯЕЁББэДяЦ№РДФбЖШДѓвЛаЉ--БиаыгУЕНдЫЖЏКЯГЩгыЗжНтЕФЖЈЪНЁЃЪБМфдЪаэЕФЛАЃЌПЩвдзівЛИіЖдБШНщЩмЁЃ)
СэНтЃКжЪаФдЫЖЏЖЈТЩ
ШЫЁЂДЌЯЕЭГЫЎЦНЗНЯђУЛгаЭтСІЃЌЙЪЯЕЭГжЪаФЮоМгЫйЖШЁњЯЕЭГжЪаФЮоЮЛвЦЁЃЯШЧѓГіГѕЬЌЯЕЭГжЪаФ(гУЫќЕНДЌЕФжЪаФЕФЫЎЦНОрРыxБэДяЁЃИљОнСІОиЦНКтжЊЪЖЃЌЕУЃКx =  )ЃЌгжИљОнЃЌФЉЬЌЕФжЪСПЗжВМгыГѕЬЌБШНЯЃЌЯрЖдећЬхжЪаФЪЧзѓгвЖдГЦЕФЁЃХЊЧхСЫетвЛЕуКѓЃЌЧѓНтДЌЕФжЪаФЮЛвЦвзШчЗДеЦЁЃ
)ЃЌгжИљОнЃЌФЉЬЌЕФжЪСПЗжВМгыГѕЬЌБШНЯЃЌЯрЖдећЬхжЪаФЪЧзѓгвЖдГЦЕФЁЃХЊЧхСЫетвЛЕуКѓЃЌЧѓНтДЌЕФжЪаФЮЛвЦвзШчЗДеЦЁЃ
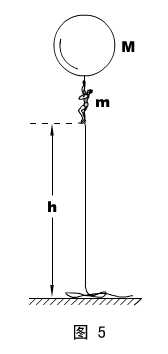 (бЇЩњЛюЖЏ)ЫМПМЃКШчЭМ5ЫљЪОЃЌдкЮоЗчЕФЬьПеЃЌШЫзЅзЁЦјЧђЯТУцЕФЩўЫїЃЌКЭЦјЧђЧЁФмОВжЙЦНКтЃЌШЫКЭЦјЧђЕижЪСПЗжБ№ЮЊmКЭM ЃЌДЫЪБШЫРыЕиУцИпh ЁЃЯждкШЫгћбиаќЫїЯТНЕЕНЕиУцЃЌЪдЮЪЃКвЊШЫГфЗжАВШЋЕизХЕиЃЌЩўЫїжСЩйвЊЖрГЄЃП
(бЇЩњЛюЖЏ)ЫМПМЃКШчЭМ5ЫљЪОЃЌдкЮоЗчЕФЬьПеЃЌШЫзЅзЁЦјЧђЯТУцЕФЩўЫїЃЌКЭЦјЧђЧЁФмОВжЙЦНКтЃЌШЫКЭЦјЧђЕижЪСПЗжБ№ЮЊmКЭM ЃЌДЫЪБШЫРыЕиУцИпh ЁЃЯждкШЫгћбиаќЫїЯТНЕЕНЕиУцЃЌЪдЮЪЃКвЊШЫГфЗжАВШЋЕизХЕиЃЌЩўЫїжСЩйвЊЖрГЄЃП
НтЃККЭФЃаЭМИКѕЭъШЋЯрЭЌЃЌДЫДІЕФЩўГЄЖдгІФЃаЭжаЕФЁАДЌЕФГЄЖШЁБ(ЁАГфЗжАВШЋзХЕиЁБЕФКЌвхЪЧВЛдЪаэШЫЭбРыЩўЫїЬјдОзХЕи)ЁЃ
Д№ЃКh ЁЃ
(бЇЩњЛюЖЏ)ЫМПМЃКШчЭМ6ЫљЪОЃЌ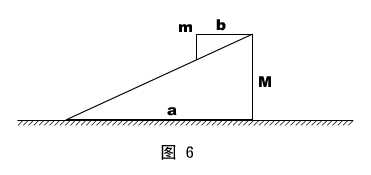 СНИіЧуНЧЯрЭЌЕФаБУцЃЌЛЅЯрЕЙПлзХЗХдкЙтЛЌЕФЫЎЦНЕиУцЩЯЃЌаЁаБУцдкДѓаБУцЕФЖЅЖЫЁЃНЋЫќУЧЮоГѕЫйЪЭЗХКѓЃЌаЁаБУцЯТЛЌЃЌДѓаБУцКѓЭЫЁЃвбжЊДѓЁЂаЁаБУцЕФжЪСПЗжБ№ЮЊMКЭm ЃЌЕзБпГЄЗжБ№ЮЊaКЭb ЃЌЪдЧѓЃКаЁаБУцЛЌЕНЕзЖЫЪБЃЌДѓаБУцКѓЭЫЕФОрРыЁЃ
СНИіЧуНЧЯрЭЌЕФаБУцЃЌЛЅЯрЕЙПлзХЗХдкЙтЛЌЕФЫЎЦНЕиУцЩЯЃЌаЁаБУцдкДѓаБУцЕФЖЅЖЫЁЃНЋЫќУЧЮоГѕЫйЪЭЗХКѓЃЌаЁаБУцЯТЛЌЃЌДѓаБУцКѓЭЫЁЃвбжЊДѓЁЂаЁаБУцЕФжЪСПЗжБ№ЮЊMКЭm ЃЌЕзБпГЄЗжБ№ЮЊaКЭb ЃЌЪдЧѓЃКаЁаБУцЛЌЕНЕзЖЫЪБЃЌДѓаБУцКѓЭЫЕФОрРыЁЃ
 НтЃКЫЎЦНЗНЯђЖЏСПЪиКуЁЃНтЬтЙ§ГЬДгТдЁЃ
НтЃКЫЎЦНЗНЯђЖЏСПЪиКуЁЃНтЬтЙ§ГЬДгТдЁЃ
Д№ЃК(aЃb)ЁЃ
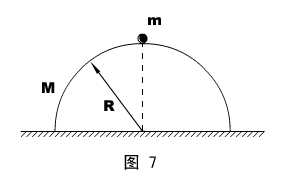
НјНзгІгУЃКШчЭМ7ЫљЪОЃЌвЛИіжЪСПЮЊM ЃЌАыОЖЮЊRЕФЙтЛЌОљжЪАыЧђЃЌОВжУгкЙтЛЌЫЎЦНзРУцЩЯЃЌдкЧђЖЅгавЛИіжЪСПЮЊmЕФжЪЕуЃЌгЩОВжЙПЊЪМбиЧђУцЯТЛЌЁЃЪдЧѓЃКжЪЕуРыПЊЧђУцвдЧАЕФЙьМЃЁЃ
 НтЫЕЃКжЪЕуЯТЛЌЃЌАыЧђКѓЭЫЃЌетИіЮяРэЧщаЮКЭЩЯУцЕФЫЋаБУцЮЪЬтЪЎЗжЯрЫЦЃЌзаЯИЗжЮіЃЌгЩгкЭЌбљТњзуЫЎЦНЗНЯђЖЏСПЪиКуЃЌЙЪЮвУЧНщЩмЕФЁАЖЈЪНЁБЪЧЪЪгУЕФЁЃЖЈЪННтОіСЫЫЎЦНЮЛвЦ(ЮЛжУ)ЕФЮЪЬтЃЌЪњжБзјБъдђашвЊДгЪ§бЇЕФНЧЖШЯывЛаЉАьЗЈЁЃ
НтЫЕЃКжЪЕуЯТЛЌЃЌАыЧђКѓЭЫЃЌетИіЮяРэЧщаЮКЭЩЯУцЕФЫЋаБУцЮЪЬтЪЎЗжЯрЫЦЃЌзаЯИЗжЮіЃЌгЩгкЭЌбљТњзуЫЎЦНЗНЯђЖЏСПЪиКуЃЌЙЪЮвУЧНщЩмЕФЁАЖЈЪНЁБЪЧЪЪгУЕФЁЃЖЈЪННтОіСЫЫЎЦНЮЛвЦ(ЮЛжУ)ЕФЮЪЬтЃЌЪњжБзјБъдђашвЊДгЪ§бЇЕФНЧЖШЯывЛаЉАьЗЈЁЃ
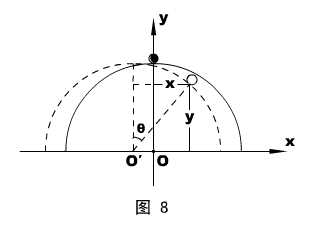
ЮЊбАЧѓЙьМЃЗНГЬЃЌЮвУЧашвЊНЈСЂвЛИізјБъЃКвдАыЧђЧђаФOЮЊдЕуЃЌбижЪЕуЛЌЯТвЛВрЕФЫЎЦНжсЮЊxзјБъЁЂЪњжБжсЮЊyзјБъЁЃ
гЩгкжЪЕуЯрЖдАыЧђзмЪЧзідВжмдЫЖЏЕФ(РыПЊЧђУцЧА)ЃЌгаБивЊв§ШыЯрЖддЫЖЏжаАыЧђЧђаФOЁфЕФЗНЮЛНЧІШРДБэДяжЪЕуЕФЫВЪБЮЛжУЃЌШчЭМ8ЫљЪОЁЃ
гЩЁАЖЈЪНЁБЃЌвзЕУЃК
x = RsinІШЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ
Ђй
ЖјгЩЭМжЊЃКy = RcosІШЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ Ђк
ВЛФбПДГіЃЌЂйЁЂЂкСНЪНЪЕМЪЩЯвбОЪЧвЛИіЙьМЃЕФВЮЪ§ЗНГЬЁЃЮЊСЫУїШЗЙьМЃЕФаджЪЃЌЮвУЧПЩвдНЋВЮЪ§ІШЯћЕєЃЌЪЙЫќУЧГЩЮЊЃК
 ЁЁ+
ЁЁ+  ЁЁ=
1
ЁЁ=
1
етбљЃЌЬиеїОЭУїЯдСЫЃКжЪЕуЕФЙьМЃЪЧвЛИіГЄЁЂЖЬАыжсЗжБ№ЮЊRКЭRЕФЭждВЁЃ
ЮяРэЧщаЮЃКдкЙтЛЌЕФЫЎЦНЕиУцЩЯЃЌгавЛСОГЕЃЌГЕФкгавЛИіШЫКЭNИіЧІЧђЃЌЯЕЭГдРДДІгкОВжЙзДЬЌЁЃЯжГЕФкЕФШЫвдвЛЖЈЕФЫЎЦНЫйЖШНЋЧІЧђвЛИівЛИіЕиЯђГЕЭтХзГіЃЌГЕзгКЭШЫНЋЛёЕУЗДГхЫйЖШЁЃЕквЛЙ§ГЬЃЌБЃГжУПДЮЯрЖдЕиУцХзЧђЫйТЪОљЮЊv ЃЌжБЕННЋЧђХзЭъЃЛЕкЖўЙ§ГЬЃЌБЃГжУПДЮЯрЖдГЕзгХзЧђЫйТЪОљЮЊv ЃЌжБЕННЋЧђХзЭъЁЃЪдЮЪЃКФФвЛЙ§ГЬЪЙГЕзгЛёЕУЕФЫйЖШИќДѓЃП
ФЃаЭЗжЮіЃКЖЏСПЪиКуЖЈТЩБиаыбЁШЁбаОПЖдЯѓжЎЭтЕФЕкШ§ЗН(ЛђЕкЫФЁЂЕкЮхЗН)ЮЊВЮееЮяЃЌетвтЮЖзХЃЌБОЮЪЬтВЛФмбЁГЕзгЮЊВЮееЁЃвЛАубЁЕиУцЮЊВЮееЯЕЃЌетбљЖдЁАЕкЖўЙ§ГЬЁБЕФЧІЧђЖЏСПБэДяЃЌОЭаЮГЩСЫФбЕуЃЌБиаыв§НјЯрЖдЫйЖШгыОјЖдЫйЖШЕФЙиЯЕЁЃжСгкЁАЕквЛЙ§ГЬЁБЃЌБШНЯМђЕЅЃКNДЮХзЧђКЭНЋNИіЧђвЛДЮадХзГіЪЧЭъШЋЕШаЇЕФЁЃ
ЩшГЕКЭШЫЕФжЪСПЮЊM ЃЌУПИіЧІЧђЕФжЪСПЮЊm ЁЃгЩгкЪИСПЕФЗНЯђТфдквЛЬѕжБЯпЩЯЃЌПЩвдМйЖЈвЛИіе§ЗНЯђКѓЃЌНЋЪИСПдЫЫуЛЏЮЊДњЪ§дЫЫуЁЃЩшГЕЫйЗНЯђЮЊе§ЃЌЧвЕквЛЙ§ГЬЛёЕУЕФЫйЖШДѓаЁЮЊV1 ЕкЖўЙ§ГЬЛёЕУЕФЫйЖШДѓаЁЮЊV2 ЁЃ
ЕквЛЙ§ГЬЃЌгЩгкЧІЧђУПДЮЕФЖЏСПЖМЯрЭЌЃЌПЩНЋЖрДЮХзЧђПДГЩвЛДЮХзГіЁЃГЕзгЁЂШЫКЭNИіЧђЖЏСПЪиКуЁЃ
0 = Nm(-v) + MV1
ЕУЃКV1 =  vЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ
ЁЁЁЁЁЁЁЁЁЁЂй
vЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ
ЁЁЁЁЁЁЁЁЁЁЂй
ЕкЖўЙ§ГЬЃЌБиаыж№ДЮПМВщЧІЧђгыГЕзг(ШЫ)ЕФзїгУЁЃ
ЕквЛИіЧђгы(NЈC1)ИіЧђЁЂШЫЁЂГЕЯЕЭГзїгУЃЌЭъБЯКѓЃЌЩшЁАЯЕЭГЁБЫйЖШЮЊu1 ЁЃжЕЕУзЂвтЕФЪЧЃЌИљОндЫЖЏКЯГЩЗЈдђ ЃЌЧІЧђЖдЕиЕФЫйЖШВЂВЛЪЧ(-v)ЃЌЖјЪЧ(-v + u1)ЁЃЫќУЧЖЏСПЪиКуЗНГЬЮЊЃК
ЃЌЧІЧђЖдЕиЕФЫйЖШВЂВЛЪЧ(-v)ЃЌЖјЪЧ(-v + u1)ЁЃЫќУЧЖЏСПЪиКуЗНГЬЮЊЃК
0 = m(-v + u1) +(M +(N-1)m)u1
ЕУЃКu1 =
ЕкЖўИіЧђгы(N -2)ИіЧђЁЂШЫЁЂГЕЯЕЭГзїгУЃЌЭъБЯКѓЃЌЩшЁАЯЕЭГЁБЫйЖШЮЊu2 ЁЃЫќУЧЖЏСПЪиКуЗНГЬЮЊЃК
(M+(N-1)m)u1 = m(-v + u2) +(M+(N-2)m)u2
ЕУЃКu2 = ЁЁ+ 
ЕкШ§ИіЧђгы(N -2)ИіЧђЁЂШЫЁЂГЕЯЕЭГзїгУЃЌЭъБЯКѓЃЌЩшЁАЯЕЭГЁБЫйЖШЮЊu3 ЁЃЧІЧђЖдЕиЕФЫйЖШЪЧ(-v + u3)ЁЃЫќУЧЖЏСПЪиКуЗНГЬЮЊЃК
(M+(N-2)m)u2 = m(-v + u3) +(M+(N-3)m)u3
ЕУЃКu3 = + ЁЁ+ 
вдДЫРрЭЦ(Й§ГЬзЂвтЃКЯШевuNКЭuN-1ЙиЯЕЃЌдйПДuNКЭvЕФЙиЯЕЃЌВЛвЊМБгкЛЏМђЭЈЗж)ЁЁЃЌuNЕФЭЈЪНвбОПЩвдевГіЃК
V2 = uN = ЁЁ+ ЁЁ+ ЁЁ+ Ё + 
МДЃКV2 =  ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЂк
ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЂк
ЮвУЧдйНЋЂйЪНИФаДГЩЃК
V1 =  ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЂйЁф
ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЂйЁф
ВЛФбЗЂЯжЃЌЂйЁфЪНКЭЂкЪНЖМгаNЯюЃЌУПЯюЕФЗжзгЖМЯрЭЌЃЌЕЋЂйЁфЪНжаУПЯюЕФЗжФИЖМБШЂкЪНжаЕФЗжФИаЁЃЌЫљвдгаЃКV1 ЃО V2 ЁЃ
НсТлЃКЕквЛЙ§ГЬЪЙГЕзгЛёЕУЕФЫйЖШНЯДѓЁЃ
(бЇЩњЛюЖЏ)ЫМПМЃКжЪСПЮЊMЕФГЕЩЯЃЌгаnИіжЪСПОљЮЊmЕФШЫЃЌЫќУЧОВжЙдкЙтЛЌЕФЫЎЦНЕиУцЩЯЁЃЯждкГЕЩЯЕФШЫвдЯрЖдГЕДѓаЁКуЮЊvЁЂЗНЯђЫЎЦНЯђКѓЕФГѕЫйЭљГЕЯТЬјЁЃЕквЛЙ§ГЬЃЌNИіШЫЭЌЪБЬјЯТЃЛЕкЖўЙ§ГЬЃЌNИіШЫвРДЮЬјЯТЁЃЪдЮЪЃКФФвЛДЮГЕзгЛёЕУЕФЫйЖШНЯДѓЃП
НтЃКЕкЖўЙ§ГЬНсТлКЭЩЯУцЕФФЃаЭЭъШЋЯрЭЌЃЌЕквЛЙ§ГЬНсТлЮЊV1 =  ЁЁЁЃ
ЁЁЁЃ
Д№ЃКЕкЖўЙ§ГЬЛёЕУЫйЖШДѓЁЃ
ЙњМЪбЇаЃгХбЁ - СЗЯАВсСаБэ - ЪдЬтСаБэ
КўББЪЁЛЅСЊЭјЮЅЗЈКЭВЛСМаХЯЂОйБЈЦНЬЈ | ЭјЩЯгаКІаХЯЂОйБЈзЈЧј | ЕчаХеЉЦОйБЈзЈЧј | ЩцРњЪЗащЮожївхгаКІаХЯЂОйБЈзЈЧј | ЩцЦѓЧжШЈОйБЈзЈЧј
ЮЅЗЈКЭВЛСМаХЯЂОйБЈЕчЛАЃК027-86699610 ОйБЈгЪЯфЃК58377363@163.com